Bin Picking mit 3D-Robot-Vision
Hohe Qualität bei steigender Wirtschaftlichkeit – das sind Anforderungen der Industrie an neue Fertigungsprozesse. Das Ziel lässt sich u.a. durch verkürzte Stück-, Rüst- und damit auch Durchlaufzeiten erreichen. Ein Beispiel von Pose Automation & IDS.

Bild: IDS Imaging Development Systems GmbH
Der Einsatz von Robotern und 3D-Technologie ermöglicht immer flexiblere Fertigungsprozesse. So beschleunigen sie die Produktherstellung und können für Wettbewerbsvorteile sorgen. Ein Beispiel kommt von Pose Automation aus Langenargen. Der Systemintegrator entwickelt Hightech-Systeme für Bildverarbeitung und Robotik – wie eine Bin-Picking-Anwendung zum Greifen von Kathetern für die Veterinärmedizin, bestückt mit einer Ensenso-3D-Kamera von IDS Imaging Development Systems.
Die Katheder werden im Anschluss an die Produktion zunächst auf einem Förderband ungeordnet bis in den Greifbereich des Roboterarms transportiert. Zur schnellen Erkennung der einzelnen Teile ist das System mit einer 3D-Kamera ausgestattet. Sie erfasst die durcheinander liegenden Katheter und liefert eine dreidimensionale Punktewolke, woraufhin Position und Lage der zu greifenden Objekte berechnet werden. Der Roboter steuert sie gezielt an, greift je zwei Stück pro Durchlauf und legt diese einzeln in Formatrohre ein. Sowohl das Erkennen und Ergreifen unterschiedlicher Katheterausführungen als auch weitere Montageschritte, wie das Anbringen von Schlauchstücken, sind möglich.
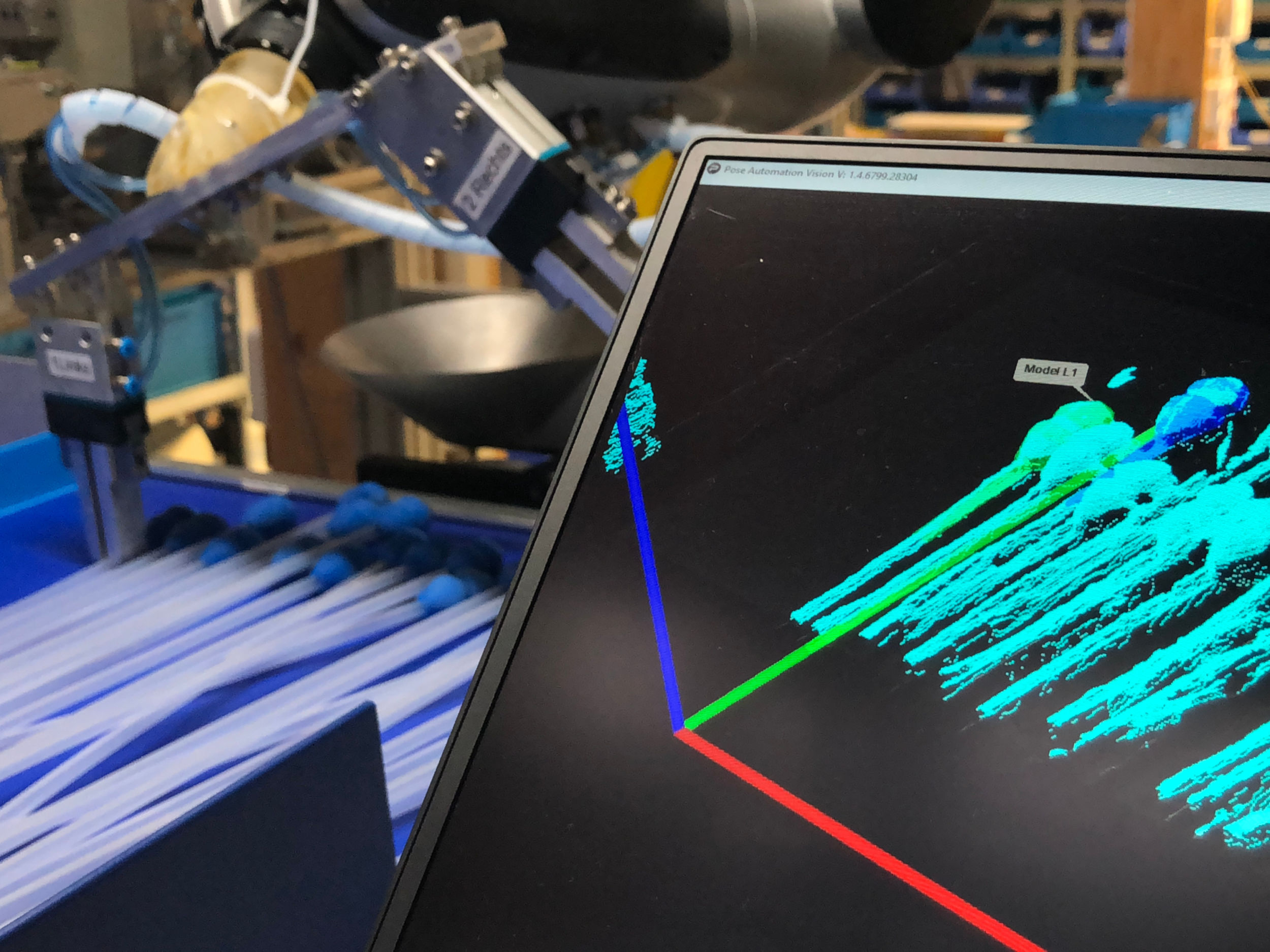
Ensenso N35 erzeugt dreidimensionale Punktewolken der durcheinander liegenden Katheter. (Bild: IDS Imaging Development Systems GmbH)
Auf diese Weise lassen sich verschiedene Katheter von unterschiedlichen Produktionsmaschinen auf der gleichen Verpackungsanlage einpacken. Die Auslieferung der Ware kann exakt an den Kundenbedarf angepasst und Lagerhaltung minimiert werden. Zur Teileerkennung setzt Pose Automation auf eine Ensenso-N35-Stereo-Vision-Kamera mit GigE-Schnittstelle und Power-over-Ethernet. Die 3D-Kamera erfüllt die Anforderungen der Schutzart IP65/67 und ist somit vor Schmutz, Staub und Spritzwasser geschützt.
„Die Ensenso N35 von IDS liefert detailgenaue 3D-Bilddaten mit hoher Geschwindigkeit. Die Lage der Katheter auf dem Förderband sowie der Greifweg des Roboters können damit schnell und präzise bestimmt werden“, erklärt Sebastian Pose, Geschäftsführer von Pose Automation und ergänzt: „Auch transparente Objektteile werden dank FlexView zuverlässig erkannt.“ Diese Technologie erhöht in Verbindung mit ausgefeilten SC-Algorithmen (Sequenzkorrelation) die Ergebnisgenauigkeit der Kamera. Dazu projiziert ein beweglich gelagerter Hochleistungsprojektor ein Zufallsmuster auf das Prüfobjekt, wodurch Bildmaterial mit unterschiedlichen Oberflächenstrukturen des Objekts erzeugt wird. Die SC-Algorithmen berechnen daraus die 3D-Objektdaten. Softwareseitig arbeitet Pose Automation in diesem Falle mit Halcon.

Die Ensenso-3D-Kamera eignet sich bestens für den Einsatz im industriellen Umfeld. (Bild: IDS Imaging Development Systems GmbH)











