3D-Snapshot-Sensoren für robotergeführte Prüfanwendungen
LMI Technologies hat seine 5MP-Stereo-Snapshot-Serie um den smarten 3D-Snapshot-Sensor Gocator 3520 erweitert. Der 3D-Sensor bietet ein erweitertes Sichtfeld mit hoher XY-Auflösungen, kurzen Belichtungszeiten und schneller Datenerfassungsrate für eine präzise Inline-Inspektion und Qualitätskontrolle.
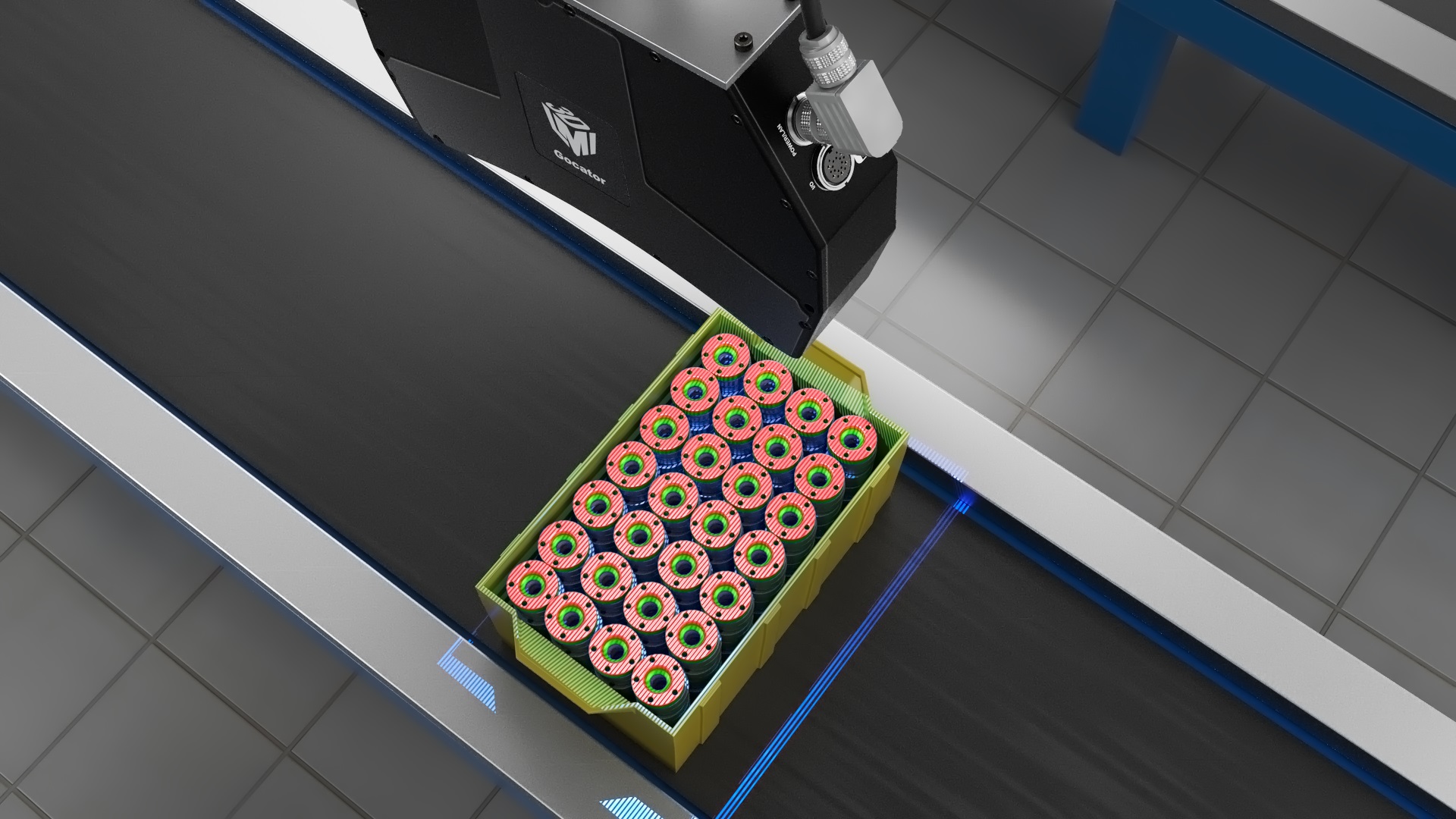
Bild: LMI Technologies GmbH
Der Sensor eignet sich für Anwendungen, wie das Scannen und Prüfen gefertigter Bauteile, für robotergeführte Prüfanwendungen, die das Zusammenfügen mehrerer Scans erfordern, um vollständige 360º-Modelle Teile und Baugruppen für die Oberflächenmessung und -prüfung zu erzeugen, und für robotergeführte Anwendungen, bei denen der Sensor dem Roboter XYZ-Koordinaten für präzise Pick&Place-Anwendungen liefert. Denkbar sind auch allgemeine Automatisierungsanwendungen, die ein großes Sichtfeld und eine hochaufgelöste 3D-Punktwolke erfordern. Mit dem großen Sichtfeld und dem geringen Messabstand des Sensors können Anwender die Weglänge des Roboterarms reduzieren und so den gesamten Inspektionsbereich erweitern. Außerdem ermöglicht dieser Aufbau einen größeren Roboterbewegungsbereich zur Unterstützung verschiedener Messwinkel.











