Mit 3D-Daten zum autonomen Roboter
Adaptive Automation
Bisher waren Roboter blinde Befehlsempfänger, die vorgegebenen und fest definierten Bahnen folgten. 3D-Daten hingegen versetzen Roboter in die Lage, sich der jeweiligen Situation adaptiv anzupassen und auf ihre Umgebung zu reagieren. Auf diese Weise wird der Roboter zu einem autonom arbeitenden Mitarbeiter, der für schnelle Umrüstzeiten, hohe Varianz von Werkstücken, einfaches Teach-In und eine vereinfachte Teilezuführung bei gleichbleibend hohem Automatisierungsgrad sorgt.
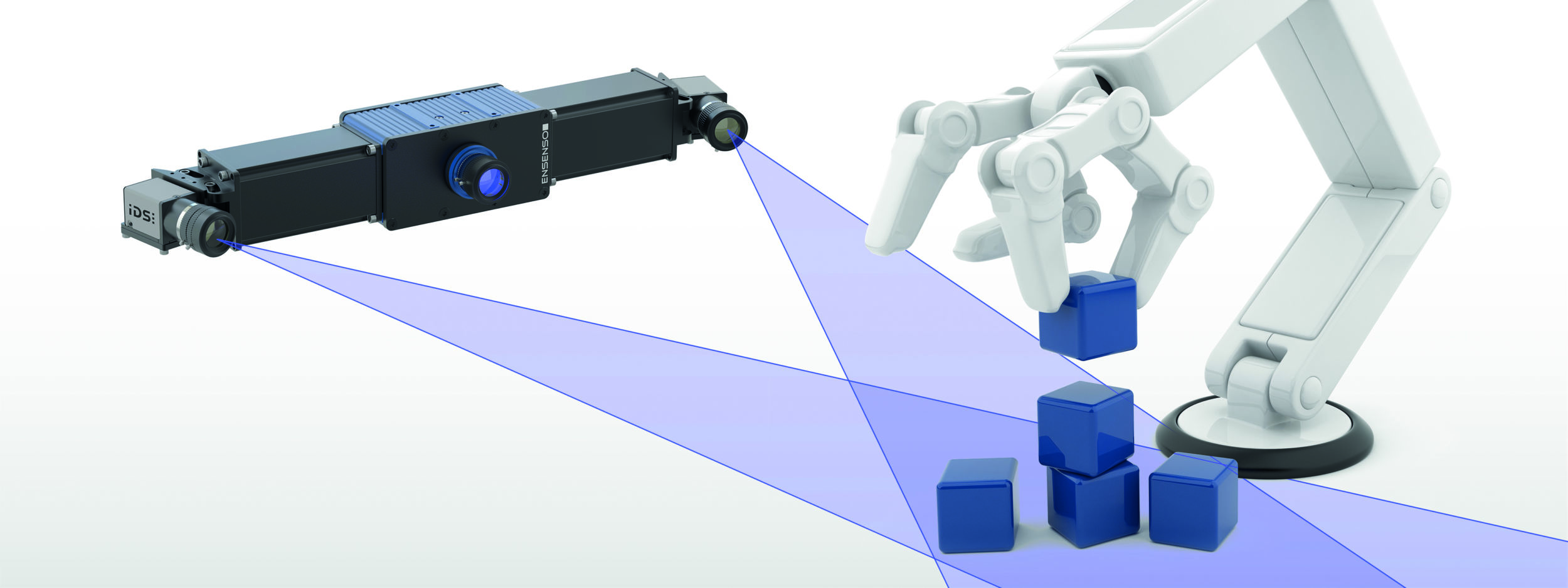
Durch 3D-Vision lassen sich neue Aufgaben lösen, die mit 2D nicht realisierbar sind. (Bild: IDS Imaging Development Systems GmbH)
Die Automatisierung erlaubt eine effiziente Fertigung mit hohen Stückzahlen. Eine hohe Spezialisierung verbessert die Effizienz noch weiter. Die Flexibilität und schnelle Umrüstung dieser spezialisierten, aber kostspieligen Anlagen bleibt allerdings häufig auf der Strecke. Schnell eine kleine Serie alternativer Teile zu fertigen, rechnet sich nicht. Denn jeder Prozessschritt wäre hierfür anzupassen. Kleinserien werden daher oft mühselig in Handarbeit produziert und gefertigt. Sie lassen sich zwar flexibel, aber nicht kostensparend sowie eher langsam und wenig prozessstabil realisieren.
Roboter arbeiten situationsbezogen
Die Entwicklung von 3D-Kameras und 3D-fähiger Software eröffnete der Branche die Erschließung neuer Machine-Vision-Verfahren. Durch 3D-Vision lassen sich neue Aufgaben lösen, die mit 2D nicht realisierbar sind. Ein Roboter entnimmt sicher und zuverlässig unsortiert und überlagernd liegende Rohr-T-Stücke direkt aus einer kleinen Transportkiste. Ein anderer Roboter depalettiert große Alugussteile direkt auf ein Förderband. Feinfühlig findet sein robuster Greifer sicheren Griff, schon beim ersten Versuch ohne die geringste Kollision mit dem Werkstück. Dazu ist er in der Lage, obwohl die Teile auf den gebrauchten oder schmutzigen Paletten oft verdreht oder durch restliche Gussrückstände schief stehen. Für diesen Griff in die Kiste (Bin Picking) und das lagerichtige Übergeben von Teilen war die Robotik gezwungen, sich weiterzuentwickeln. Isys Vision entwickelte dafür eine Lösung mit der Bezeichnung Mikado Adaptive Robot Control (kurz: ARC), eine konfigurierbare Robotersteuerung, mit eigener Bahnplanung und Kollisionsprüfung. Mit einer eigenen inversen Kinematik lassen sich die Gelenkwinkel der Roboterarme für Greifpositionen oder Verfahrwege berechnen. Ausgangspunkt für die komplexen Berechnungen sind 3D-Informationen wie die Werkstückform, die Position, die Lage oder eine virtuelle Abbildung der Umgebungssituation. Eine Vielzahl marktüblicher Roboter lassen sich über Mikado ARC steuern und machen langwieriges Programmieren überflüssig. Teilewechsel sind schnell realisiert, sodass auch die Produktion von Kleinserien mit robotergestütztem Material-Handling möglich wird.
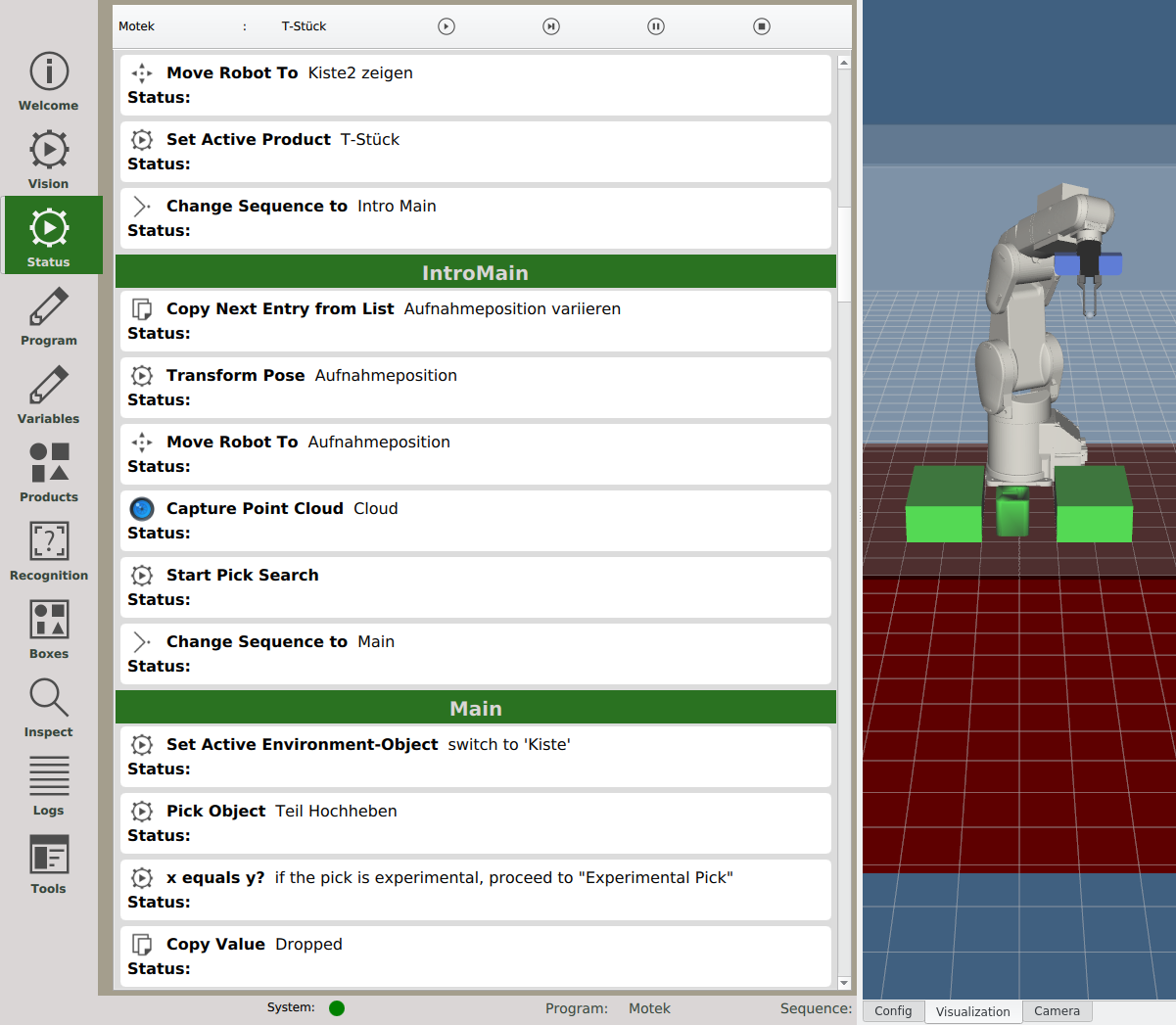
Der Ablauf der Prozessschritte ist mit der Lösung Mikado ARC für den Anwender einfach modifizierbar. (Bild: Isys Vision GmbH & Co. KG)