3D-Kameras erfassen die Situation
Ausschlaggebend für die Steuerung des Roboters sind die Ausgangsdaten. Je nach Projekt und Anwendung entscheidet sich der Integrator für die geeignete 3D-Kamera-Technik. Dabei spielen neben der generellen Eignung eines Verfahrens sowohl Kosten als auch Genauigkeit, Geschwindigkeit und robuste Datenerhebung eine Rolle. Die klassischen Verfahren wie Time-of-flight (TOF), Stereo Vision oder Lasertriangulation lassen sich nur als Vorauswahl gegeneinander abwägen. Denn viele der heute eingesetzten 3D-Kameras sind Hybridsysteme und setzen mehrere Verfahrensmerkmale ein, um ein breiteres Einsatzspektrum abzudecken und die Ergebnisse zu verbessern. Der Systemintegrator verwendet für Bin Picking und Material-Handling 3D-Stereovision-Kameras von Ensenso. Diese bestehen aus zwei Flächenkameras, die nach dem Prinzip der Stereovision arbeiten, in Verbindung mit einem leistungsstarken Patternprojektor, um selbst von Werkstücken mit schwierigen Oberflächen robuste 3D-Daten zu erhalten. Dabei eignen sich die kompakten Kameras der N-Serie vor allem im Nahbereich und kommen meist am Kopf des Roboters als mobiles Auge zum Einsatz. Das 3D-System der X-Serie ist mit der flexiblen Baseline in der Lage, mit verschiedenen Kameras von IDS Imaging Development Systems aus größeren Abständen große Volumen zu erfassen, und eignet sich für unsortiertes Material-Handling aus großen Gitterboxen. Durch die 100W Leistung erzeugt das LED-Licht des Projektors auch bei großen Arbeitsabständen von 5m noch feine Texturen auf der Werkstückoberfläche. Dadurch ist das System unabhängig vom Umgebungslicht und erlaubt kurze Belichtungszeiten. Schon mit ein bis zwei Bildpaaren sind so 3D-Auflösungen von wenigen Millimetern möglich. Mit kurzen Belichtungszeiten, wenigen Bildaufnahmen und schnellen Stereobild-Matching-Algorithmen sind 3D-Daten schon nach etwa 500ms bereit zur weiteren Verarbeitung. Damit sind hohe Taktzeiten im Material-Handling möglich. Neben der 3D-Datenerhebung durch die Stereovision lassen sich mit dem Rohbildmaterial der Flächenkameras auch Referenzmerkmale einer Szene erfassen und zur stetigen Nachjustierung des maschinellen Sehens verwenden. Die Prozessergebnisse bleiben dabei konstant und robust. Wiederkehrende Kontrolle bzw. aufwendiges Rekalibrieren des Stereovision Systems ist nicht mehr notwendig. Mit Fähigkeiten wie Bin Picking und lagerichtiger Teilezuführung schließt Mikado ARC in Zusammenarbeit mit Ensenso 3D-Kameras die Lücke zur adaptiven Automation. Selbst Kleinserien lassen sich so einfach und kosteneffizient automatisieren.
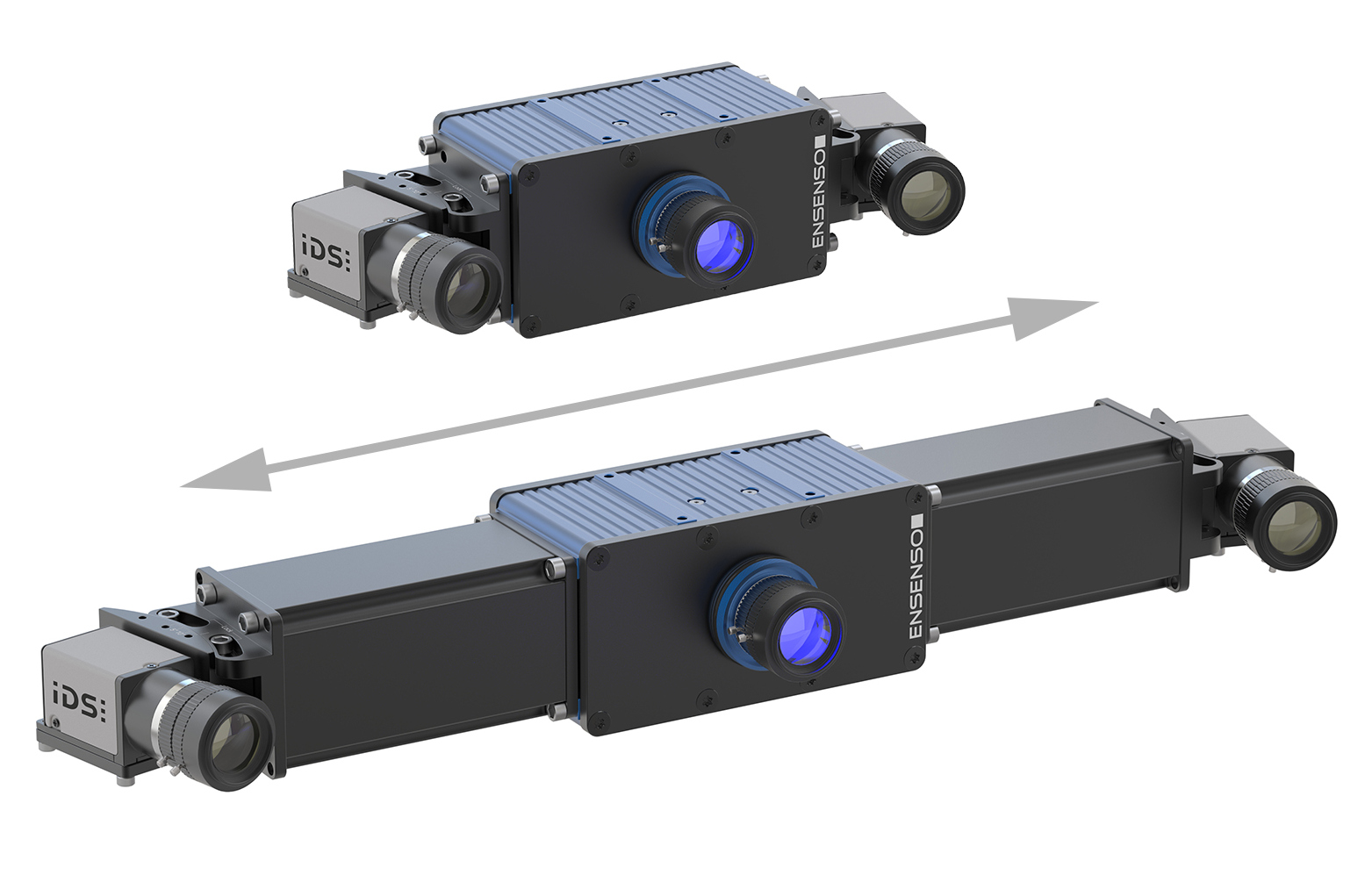
Mit variabler Baseline und einem 100W-texturprojektor lassen sich mit Stereovision-Kameras der Ensenso-X-Serie Arbeitsabstände bis ca. 5m realisieren. (Bild: IDS Imaging Development Systems GmbH)











