Automatisierte Bearbeitung von Kunststoffteilen
Toolcraft hat für das Unternehmen Nifko KTW eine Roboterzelle entwickelt, die hochwertige Interieurteile im Sichtbereich von Fahrzeugen bearbeiten soll. Die im 3K-Spritzgussverfahren hergestellten und zusätzlich mit rund 20% Glasfaser gefüllten Kunststoffbauteile haben eine Größe von 200 bis 1.000mm. Der Roboter, ein Stäubli RX 160, muss bei der Bearbeitung eine Genauigkeit von ±0,1mm erreichen. Weitere Anforderungen waren die Integration der Werkzeugverwaltung und des Werkzeugwechslers.
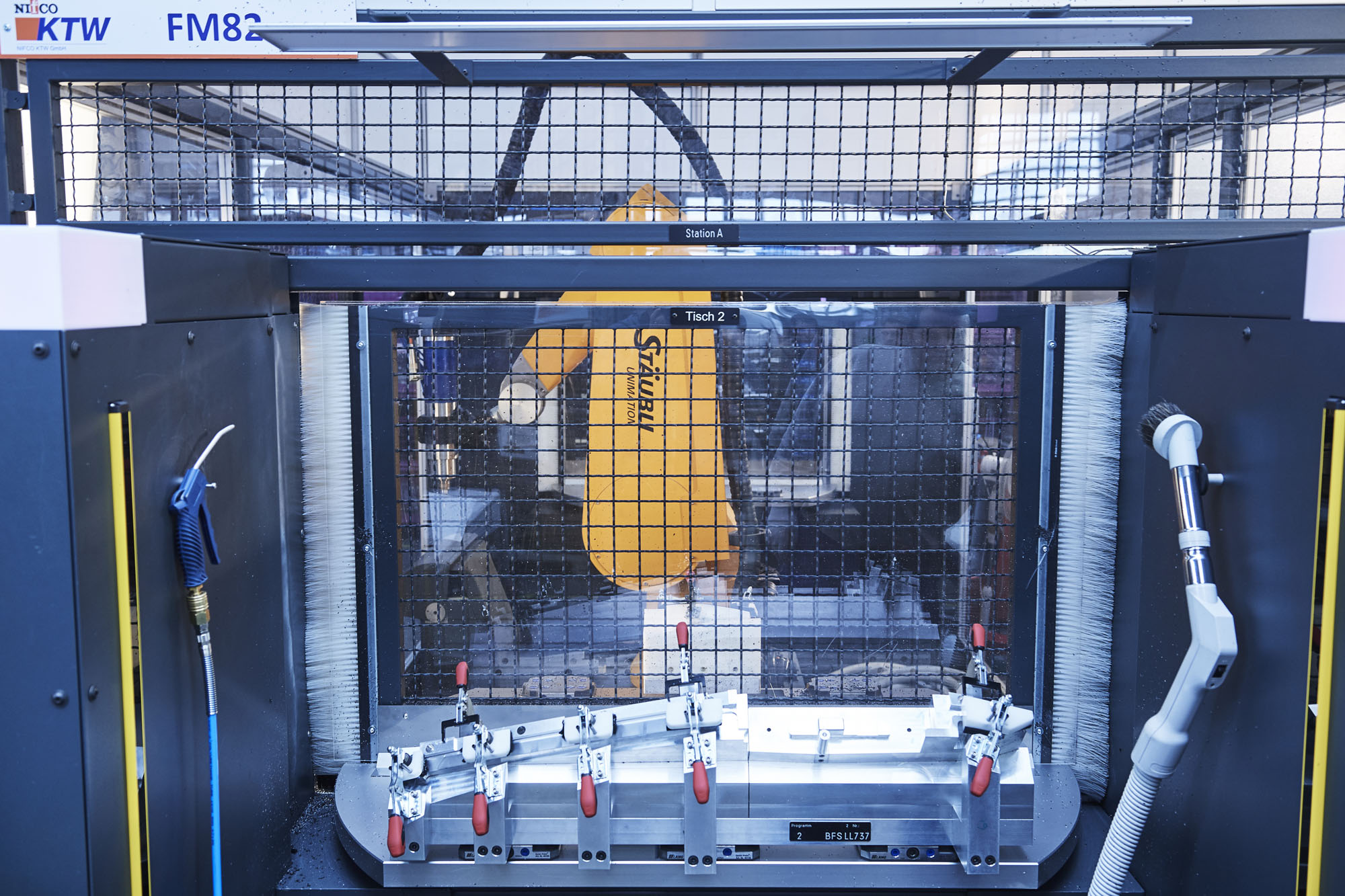
Zwei Drehtische, um 180° versetzt, verleihen der Zelle Flexibilität. (Bild: MBFZ Toolcraft GmbH)
Zwei Drehtische, die um 180° versetzt angeordnet sind, verleihen der Zelle Flexibilität. Eine komplette Umhausung sorgt für nötige Sicherheit. Das System kann acht verschiedene Bauteile aufnehmen (RFID) und verfügt über eine integrierte Absaugung der Späne. Die Vereinigung von Werkzeugverwaltung, Messsystemen und Bauteilerkennung ist die Grundvoraussetzung, um die Anforderung stabil im Bearbeitungsprozess zu gewährleisten.











