Bin-Picking-Roboterzelle für automatisierte Rohteilzuführung
Bei der Bin-Picking-Roboterzelle aus dem Modul-Programm von Indat übernimmt die Greiffunktion ein 6-Achs-Roboter, der – je nach Werkstück, Material und Geometrie – mit verschiedenen Greifersystemen ausgerüstet werden kann. Die optimale Greifposition wird von einer Robot-Vision-Lösung auf Basis von zwei Standardkameras und einer speziellen Laserbeleuchtung ermittelt.
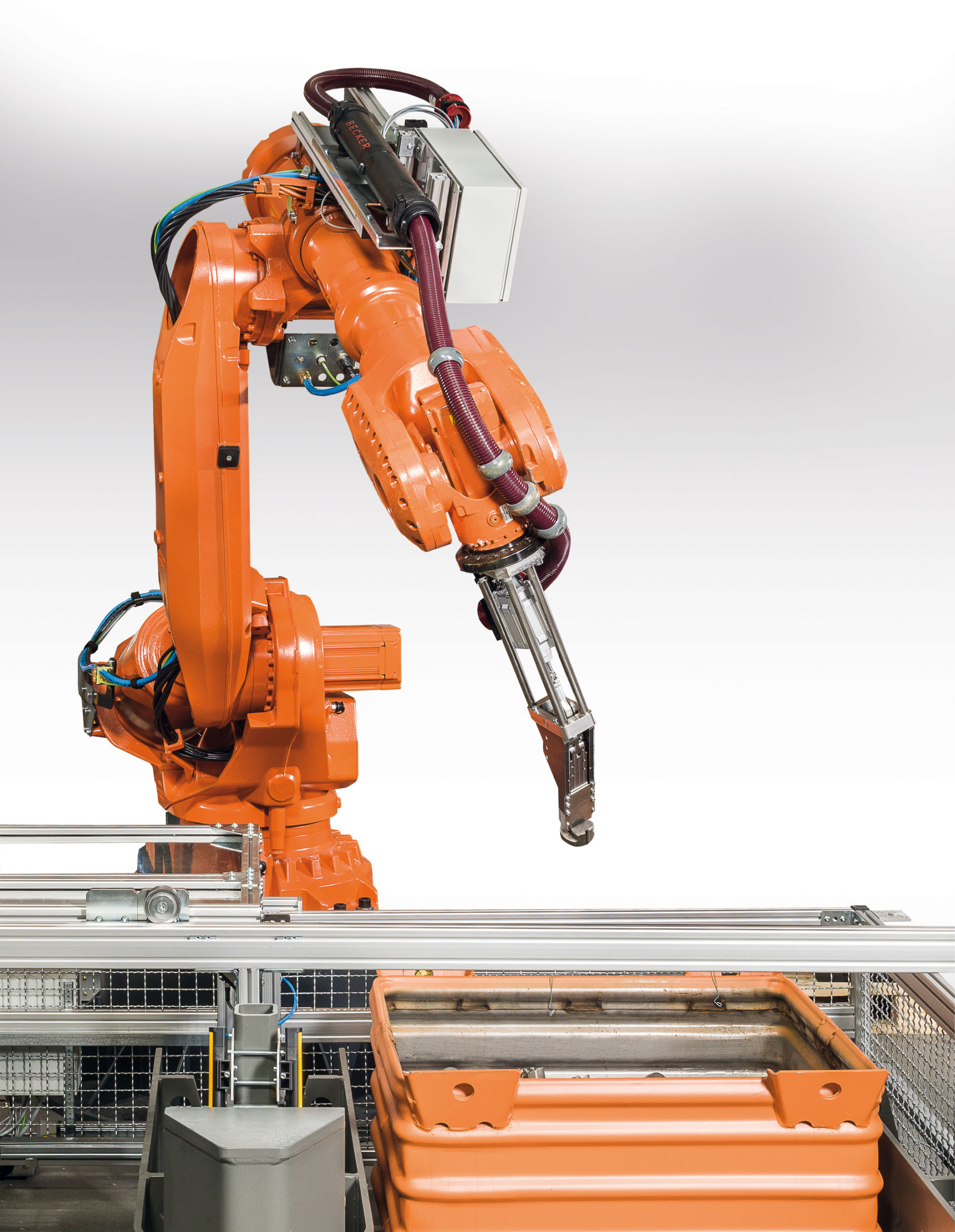
Bildverarbeitung und Greifertechnologie sind aufeinander abgestimmt, sodass Taktraten <15s erreicht werden. (Bild: Indat Robotics GmbH)
Damit lassen sich auch komplizierte Teilegeometrien in allen Tiefenlagen der Gitterboxen exakt erfassen.











