Smarte Greifmodule mit IO-Link
Clever Greifen mit IO-Link
Smarte Greifmodule mit IO-Link bieten im Vergleich zu klassischen Lösungen wesentlich mehr Flexibilität und gleichzeitig eine höhere Anlagenverfügbarkeit. Durchaus triftige Gründe, um sich mit diesem Kommunikationsstandard genauer auseinanderzusetzen.
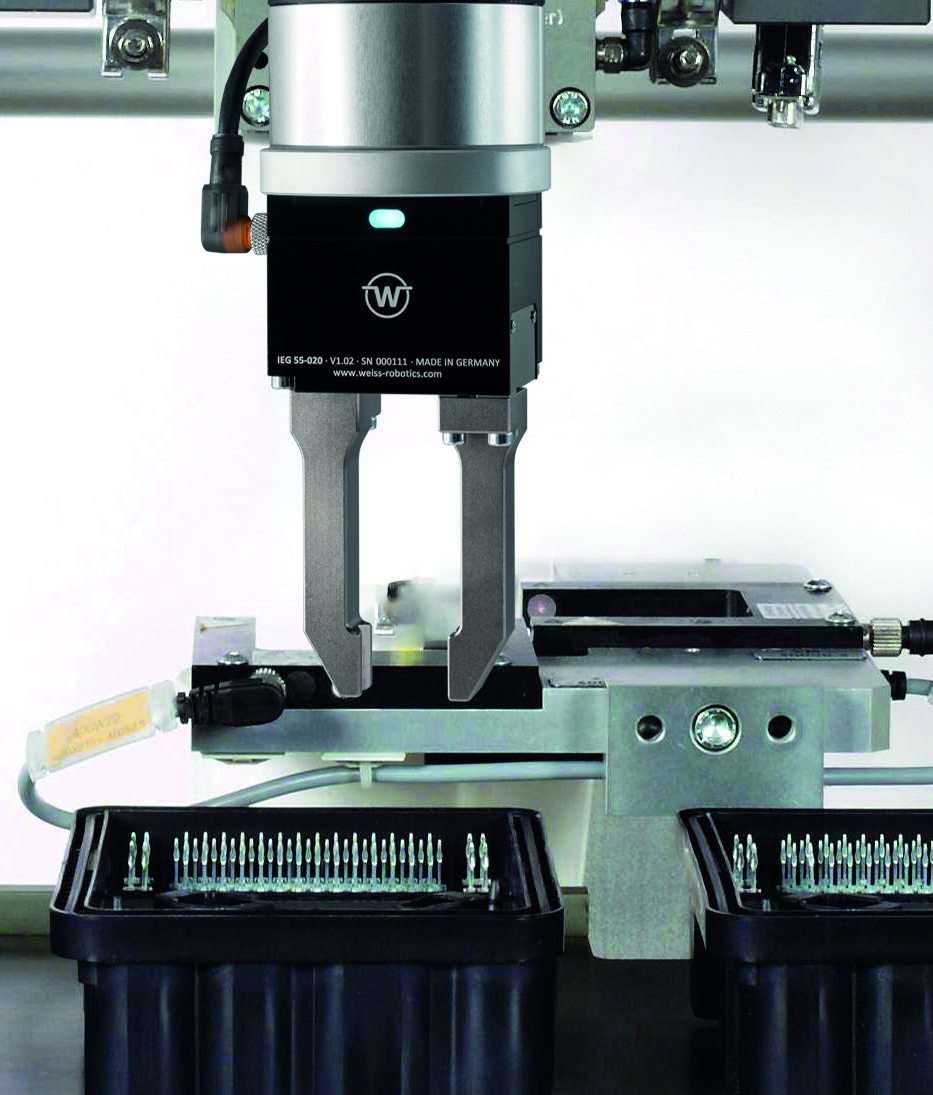
Bild: Weiss Robotics GmbH & Co. KG
Es ist 5:28 Uhr. Bei Michael Müller klingelt das Smartphone. Als Fertigungsingenieur ist er verantwortlich für eine Montagelinie bei einem großen deutschen Automobilzulieferer. Am Telefon ist Stefan Mann, der Anlagenführer aus der Frühschicht. Seit einer halben Stunde macht die Verpackungsanlage Probleme. Ein Greifer gibt sporadisch die Teile nicht mehr frei. Vermutlich mal wieder ein Problem mit den Endschaltern. Erste Reparaturversuche brachten keine Verbesserung, die Zwischenpuffer füllen sich. Jetzt ist akuter Handlungsbedarf, sonst steht die ganze Linie. Zeit für einen Kaffee ist nicht mehr – Herr Müller schwingt sich ins Auto und fährt schnell los. Im Werk angekommen wird er bereits von seinen Kollegen empfangen. Gemeinsam versuchen sie das Problem zu analysieren. Das gestaltet sich als schwierig, da der Greifer tief in der Anlage verbaut ist und der Fehler ja nur ab und an auftritt. Nach zwei Stunden können sie schließlich das Problem eingrenzen: die Zuleitung zu einem Näherungsschalter muss am Steckverbinder einen Wackelkontakt haben. Leitung und Schalter sind schnell getauscht, aber das Einstellen der Schaltpunkte ist zeitraubend – schließlich läuft die Maschine nur bei geschlossener Tür und die Einstellschrauben sind schwer erreichbar. Nach einer weiteren Stunde mühsamen Justierens läuft die Anlage wieder.
Problemfälle vermeiden
Auch wenn die Personen in dieser Erzählung frei erfunden sind, so treten solche Fälle im Produktionsalltag immer wieder auf. Dabei lassen sie sich mit dem Einsatz der mechatronischen Greifsysteme von Weiss Robotics leicht vermeiden. Deren eingebaute Greifteilerkennung und -überwachung machen externe Näherungsschalter überflüssig. So z.B. die kompakten servoelektrischen Greifmodule der IEG-Serie mit IO-Link, die mit einfacher Parametrierbarkeit, umfangreichen Diagnosemöglichkeiten und der Unterstützung bedarfsorientierter Wartung zentrale Anforderungen der moderenen Fertigung umsetzt. Die Module sind vorpositionierbar und verfügen serienmäßig über eine präzise Greifkraftregelung, um auch empfindliche Bauteile sicher handhaben zu können. Das dabei eingesetzte Regelungskonzept kommt ohne zusätzliche Sensorik aus, was Systemkosten reduziert und die Zuverlässigkeit verbessert. Dass Datenanbindung und Parametrierbarkeit auch vor pneumatischen Greifmodulen nicht Halt machen muss zeigt die RPG-Serie von Weiss. Sie vereint sowohl Ventiltechnik und Positionssensorik als auch eine leistungsfähige elektronische Steuerung. Dabei bietet sie folgende Leistungswerte: Bei vollem Hub und mit aktiver Greifteilerkennung schaffen die RPG-Greifer mehr als 500 Griffe pro Minute und reduzieren gleichzeitig die benötigte Druckluftmenge gegenüber einer konventionellen Lösung um durchschnittlich 70 Prozent.

Smarte Pneumatikgreifer mit IO-Link – Eine Leitung mit Druckluft und ein Steuerkabel genügen zum Greifen. (Bild: Weiss Robotics GmbH & Co. KG)
Einfache Anbindung per IO-Link
Egal, ob pneumatisch oder elektrisch – die Ansteuerung und Parametrierung erfolgt in beiden Fällen über IO-Link. Dieser Industriestandard kommt ursprünglich aus der Sensorwelt und war für den einheitlichen Datenaustausch mit Sensoren im Feld und deren standardisierte Parametrierung vorgesehen. Die aktuelle Version 1.1 gemäß IEC61131-9 wird zunehmend auch für Aktoren verwendet. IO-Link ist kein Ersatz für einen Feldbus. Vielmehr ist es als Upgrade der normalen IO-Leitung zwischen Sensor bzw. Aktor und der Feldbusebene zu sehen, das eine prozesssichere Datenkommunikation auch auf dem letzten Meter in der Anlage ermöglicht. Die Verkabelung ist dabei die gleiche wie bisher und erfolgt mit normalen Sensor/Aktor Leitungen. Herzstück ist der sogenannte IO-Link Master. Als Bindeglied zwischen SPS bzw. Feldbus und den IO-Link-kompatiblen Feldgeräten koordiniert er den zyklischen Prozessdatenaustausch. IO-Link Master sind heute in unterschiedlichsten Varianten verfügbar. Von der einfachen IO-Link Klemme auf der Hutschiene bis hin zum robusten dezentralen Feldkoppler mit Unterstützung diverser Feldbusse wächst das Angebot kontinuierlich. Bei Greifmodulen von Weiss Robotics kann IO-Link seine Stärken voll ausspielen. So können unterschiedliche Greifteile vorparametriert und im Betrieb einfach ausgewählt werden. Dabei wird für jedes Greifteil ein Positionsfenster festgelegt, in dem sich der Griff einstellen muss. Greift das Modul in diesem Bereich, wechselt dessen Greifzustand von ‚offen‘ auf ‚gegriffen‘, was für die SPS das Signal für einen erfolgreichen Griff ist. So lassen sich Greifanwendungen einfacher integrieren, als mit konventionellen Lösungen möglich. Denn eine steuerungsseitige Umsetzung des kompletten Greifprozesses mit Ansteuerung des Greifmoduls und Auswertung der Näherungsschalter ist nicht mehr notwendig.











