Der (re)agierende Roboter
Mikado ARC macht aus Robotern autonom arbeitende Bin-Picking-Spezialisten, die das Greifen und Ablegen von Teilen selbstständig koordinieren. Anwender müssen zudem keine Robotikspezialisten sein, denn Workflows werden konfiguriert statt programmiert.

Bild: IDS Imaging Development Systems GmbH
Robotik ist die am schnellsten wachsende Technologie in der industriellen Produktion. Eine Robot-Vision-Anwendung in Betrieb zu nehmen ist jedoch in der Regel komplex und zeitraubend. Die IDS Imaging Development Systems GmbH (www.ids-imaging.de) bietet mit der adaptiven Robotersteuerung Mikado ARC (Adaptive Robot Control) eine konfigurierbare All-in-One-Lösung für Bin Picking und (De-)Palettierung, die ohne zusätzliche Programmierung auskommt. Mit den integrierten Simulationswerkzeugen lassen sich zudem alle Arbeitsschritte vollständig virtuell entwickeln, prüfen und optimieren. Das spart Zeit und Kosten im frühen Entwicklungsstadium einer Lösung.
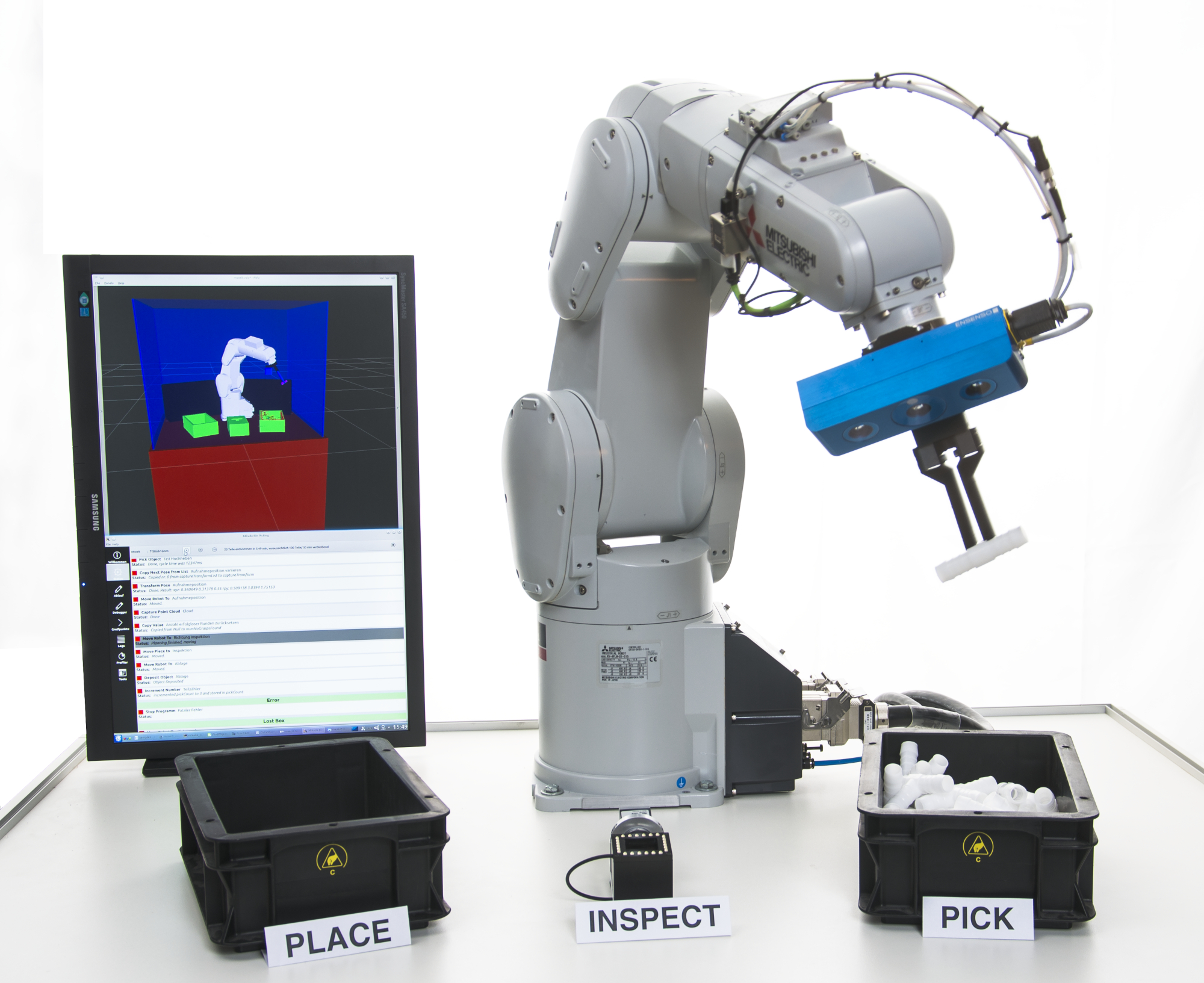
Robot-Vision-Lösung: Mikado ARC verbindet 3D-Kameratechnik von Ensenso mit einer leicht konfigurierbaren Robotersteuerung. (IDS Imaging Development Systems GmbH)
Das Fachwissen über Kommunikation und Steuerung unterschiedlicher Robotersysteme von Hersteller wie Mitsubishi, Kuka, ABB oder Fanuc ist bei Mikado ARC bereits integriert. Über vereinfacht abgebildete Kommandos wird die Roboter-Hardware abstrahiert, was weitere Vorteile mit sich bringt. Die Prozessabläufe sind dadurch ohne Anpassungen mit jedem Roboter ausführbar, der in der jeweiligen Anwendung benötigt wird.
Ensenso N-Serie: Vollintegrierte 3D-Kamera mit USB oder GigE-Schnittstelle (Bild: IDS Imaging Development Systems GmbH)
Mikado lernt neue Teile sehr einfach mittels CAD-Zeichnungen kennen; Greifpositionen müssen somit nicht mehr fest geteacht werden. Der Roboter orientiert sich selbständig und findet bekannte Teile auf Basis eines 3D-Bildes. Um Kollisionen bei den Roboterfahrten und eine 100%-Reproduzierbarkeit der Robotergriffe zu gewährleisten, plant die Lösung vollautomatisch jeden Roboterarmfahrweg mit inverser Kinematik und verfügt zusätzlich über eine Lagenachführung der Greifpositionen. Durch eine robuste Objekterkennung kann sie dem Roboter auch bei ungenauer Übergabeposition den korrekten Griff vorgeben.

Ensenso X-Serie: Hochflexibles, modulares 3D-Kamerasystem mir GigE-Schnittstelle (Bild: IDS Imaging Development Systems GmbH)
Die Robotersteuerung ist damit ideal für den Griff in die Kiste (Bin Picking), (De-)palettierung und lagerichtige Übergabe von Teilen an Folgemaschinen, Magazine oder sonstige Aufnahmen geeignet. Einfache Teilewechsel sind durch geringe Modifikationen der Werkstückparamter in nur zehn Minuten möglich. Die Kombination aus Ensenso-3D-Kameratechnik und Mikado ARC verhilft zu verkürzten Rüstzeiten bei hoher Varianz von Werkstücken, wodurch es auch sehr effizient zur Automatisierung im Prototypenbau und Kleinserien verwendet werden kann. Zudem helfen die integrierten Simulationswerkzeuge Arbeitsschritte einzeln durchzuspielen und zu optimieren, noch bevor Zeit und Geld in Prototypen investiert werden muss. Mikado ARC ist damit auch für die Planung, Entwicklung und Wartung von Robot-Vision-Lösungen geeignet. Vertrieb: IDS Imaging Development Systems GmbH.











