Cobotta-Applikationen für Labor und Industrie
Ein Cobot – viele Anwendungen
Der Cobotta ist ein kompakter Cobot von Denso Robotics, der für eine sichere Mensch/Roboter-Kollaboration entwickelt wurde. Auf der diesjährigen Hannover Messe zeigte er sein gesamtes Leistungsspektrum von der automatischen Montage über Pipettieren, Schrauben oder Klebstoffdosierung, auf einer mobilen Plattform oder einer Linearachse montiert oder ergänzt durch ein Vision-System. Darunter sind vier Applikationen besonders interessant.
")
(Bild: Denso Robotics Europe / Denso Europe B.V.)
Mit seinem Eigengewicht von 4kg, einem integrierten Controller sowie einem umfassenden Sicherheitskonzept ist der Cobotta von Denso einfach zu transportieren, sofort einsatzbereit und aufgrund der grafisch gestalteten App Cobotta World leicht zu bedienen. Sie gestattet die einfache Erstellung von typischen Handhabungs- und Pick&Place-Aufgaben mittels Tablet. Der Roboter ist als offene Plattform entwickelt und lässt sich flexibel in bestehende Systeme integrieren. Mit einer Traglastfähigkeit bis 500g (bis 700g bei senkrecht bzw. nach unten gestellter fünfter Achse) und durch seine Kompaktheit eignet er sich besonders zum Arbeiten auf begrenztem Raum und in direkter Zusammenarbeit mit dem Menschen. Die nötige Sicherheit in der Zusammenarbeit mit dem Menschen wird beim Cobotta durch ein inhärent-sicheres Design inklusive Leichtbauarm ohne scharfe Kanten und Quetschstellen sowie durch funktionale Sicherheit gewährleistet, indem die Drehmomente und Geschwindigkeiten aller Achsen kontinuierlich sicher überwacht werden. So ist auch die Geschwindigkeit (bis 900mm/s) der direkten Zusammenarbeit mit Menschen angepasst, das heißt, es ist je nach Applikation und entsprechender Risikobeurteilung keine Sicherheitszelle erforderlich. Daher erfüllt der Roboter die Normen ISO10218-1, ISO/TS15066 und ISO13849-1:2015 PLd Cat.3. Dabei sind oft selbst der elektrische Greifer und integrierte Kameras am Roboterarm komplett eingebunden. So können sowohl kraftgesteuerte Greifapplikationen als auch Applikationen sowie die Verwendung der Bilderkennung (2D) auf einfache Weise und in wenigen Minuten erstellt werden. Mit der App Remote TP können Experten zudem auch komplexe Applikationen mittels der Denso-Roboterprogrammiersprache PacScript mit einem virtuellen Roboter-Teach-Pendant erstellen.
Automatisches Schrauben
Die Screwing-Anwendung, das automatische Schrauben, umfasst einen Cobotta und einen integrierten Schraubenzieher zum flexiblen Ein- und Ausschrauben verschiedener Teile. Das Projekt demonstriert nicht nur die typischen Eigenschaften des Roboters wie Kollaboration, Flexibilität und Portabilität, sondern passt aufgrund der Kombination des kompakten Roboters mit einem ebenso kompakten Schraubenzieher auch in kleine Räume.
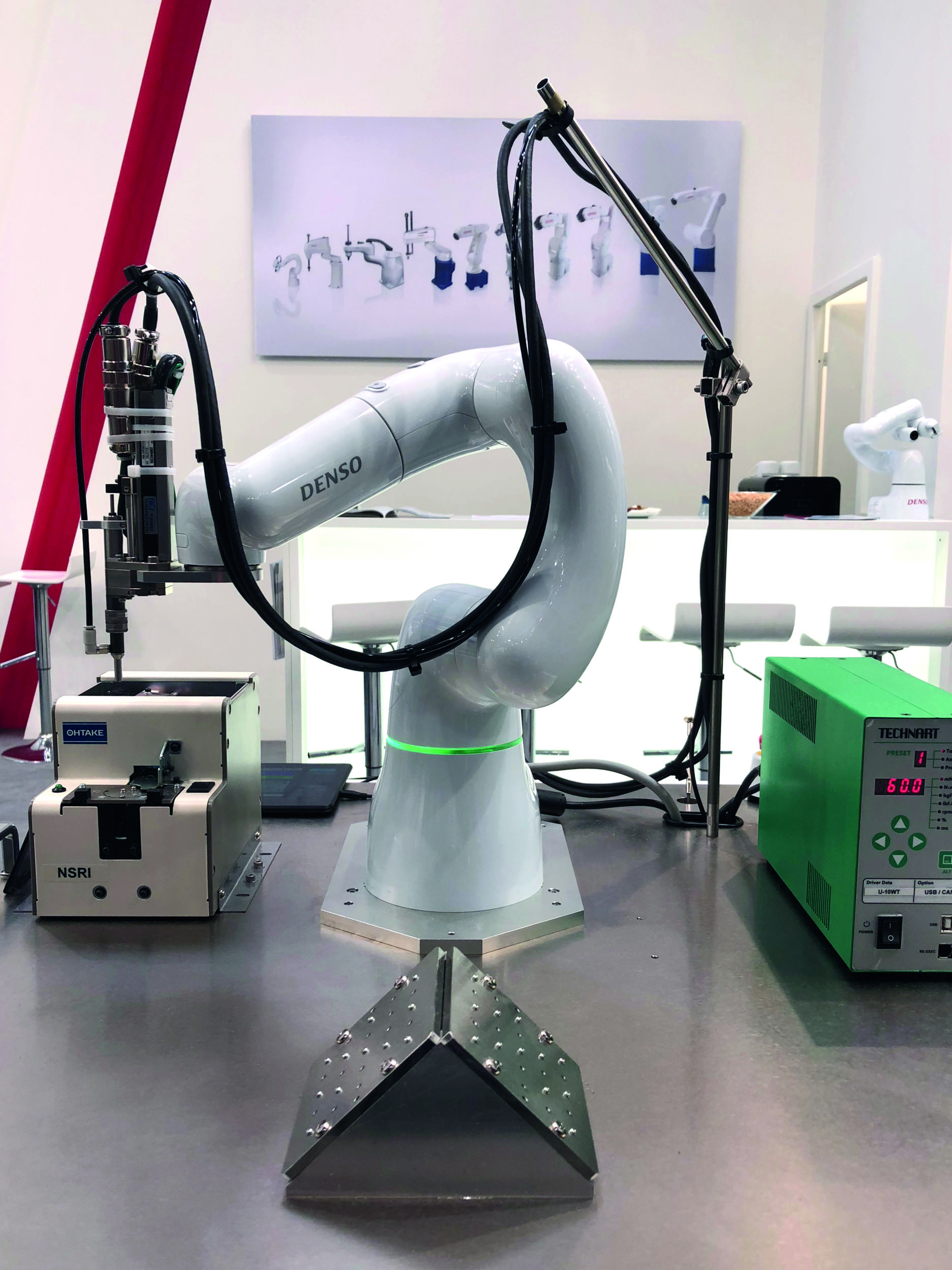
Bild: Denso Robotics Europe / Denso Europe B.V.
Erweitertes Multi-Vision-System
Das flexibel einsetzbare Bilderkennungssystem besteht aus einem Cobotta, der Software Canon Vision Edition, einer eingebauten A/F-Kamera sowie einer Pan/Tilt/Zoom-Netzwerkkamera, beide von Canon. Das System leistet die flexible Erkennung und das Handling unterschiedlicher Teile. Dabei wird der Roboter in einer 2D-Picking-Applikation eingesetzt: Auf der rechten Seite kontrolliert er Tintenstrahldruckerpatronen, auf der linken Seite unterstützt er das Ablesen von QR-Code basierten Instruktionen. Anschließend kann das System zwischen den Funktionen Sortierung nach Inhalt oder Sortierung nach Gewicht Aufgaben wählen. Die Applikation erfüllt verschiedene Funktionen, wie z.B. die fehlerfreie Identifizierung und Auswahl von Objekten nach Größe, Anzahl (bei Feldtests), bei der Farb- oder Zahlenerkennung, dem Ablesen von QR-Codes oder Barcodes sowie dem Musterabgleich, die für Anwender in Labor, Wissenschaft und Industrie typisch sind. Diese Funktionen können direkt über Canon SW programmiert und gesteuert werden.
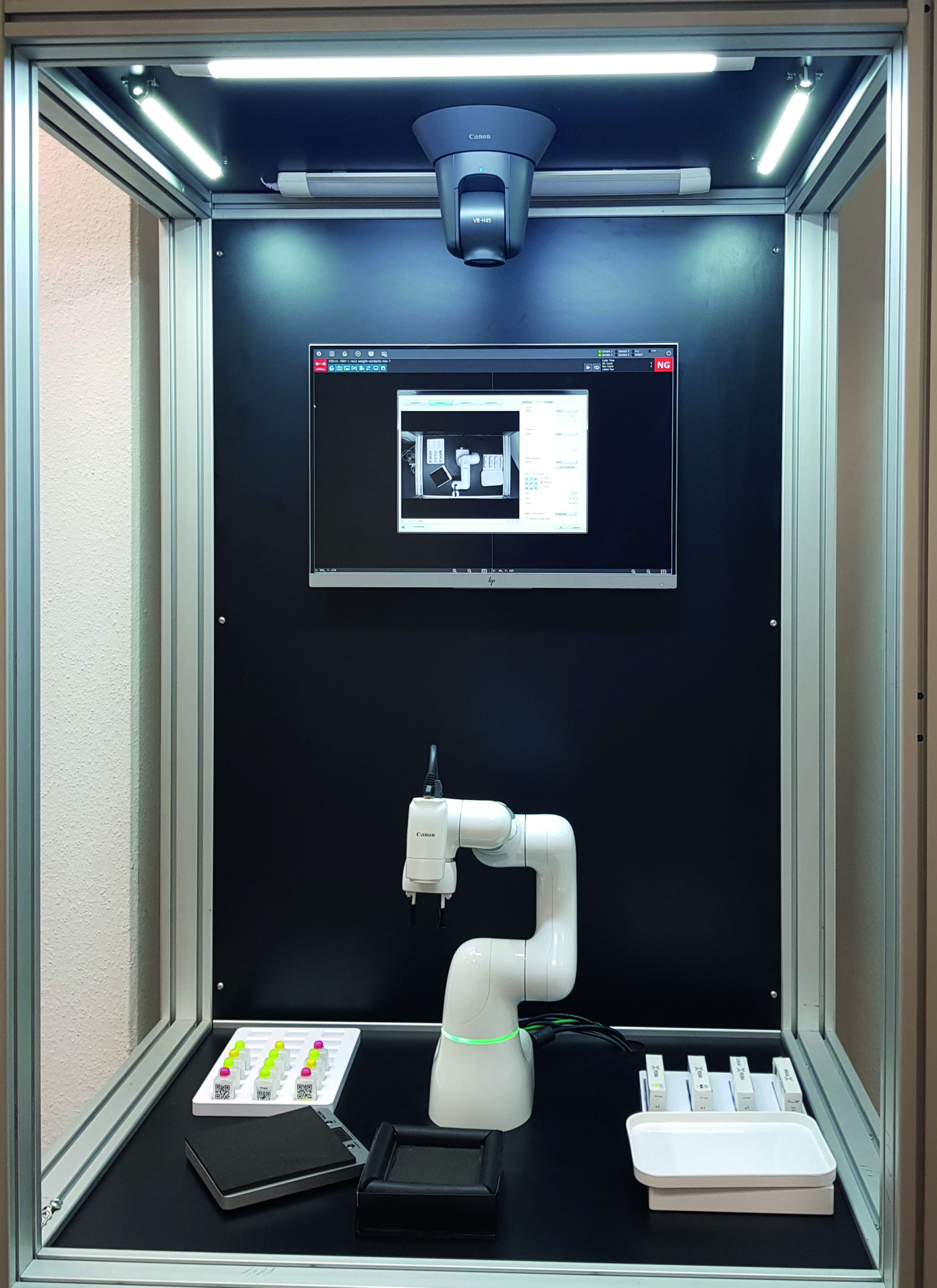
Bild: Denso Robotics Europe / Denso Europe B.V.
3D-Dosierung von Klebestoffen
Die Sealing-Applikation zeigt eine Dosierungsfunktion anhand von 3D-Objekten mittels eines Cobotta sowie eines hochpräzisen Düsenspenders, sodass eine flexible und genaue Abgabe mehrerer kleiner Mengen möglich ist. Dieses System findet ebenfalls auf sehr begrenztem Raum Platz.
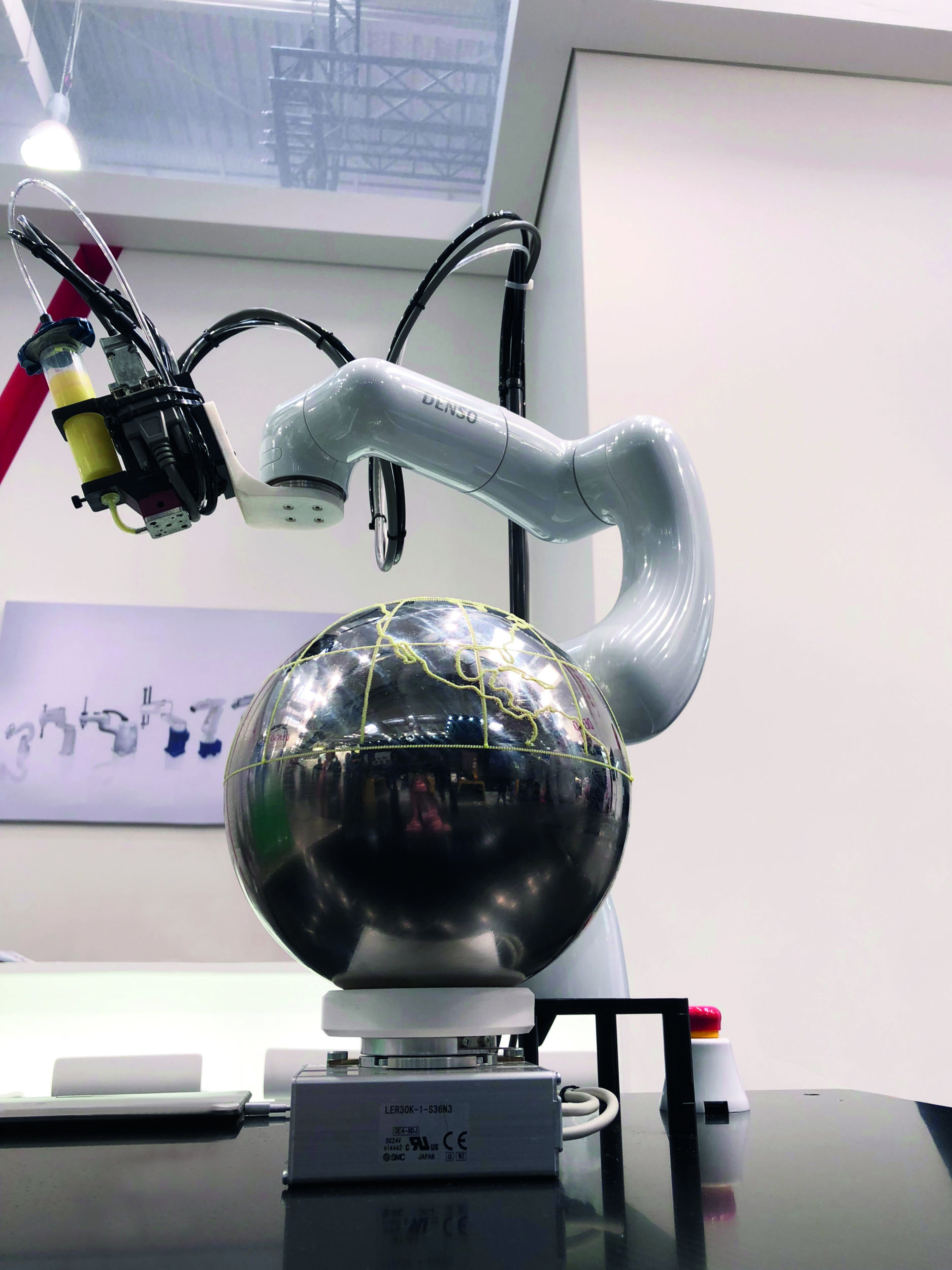
Bild: Denso Robotics Europe / Denso Europe B.V.
Interaktives Kommunikations-Tool
SpooN ist ein intelligentes, interaktives Kommunikations-Tool, das durch interaktive Charaktere lebt. Diese wurden entworfen, um menschliche Gesichtsausdrücke und Gesten zu analysieren und eine interaktive, lebendige Kommunikation mit Menschen zu ermöglichen. Die hohe Beweglichkeit von Cobotta ermöglicht es dem Tool, eine echte Interaktion mit dem Menschen zu erreichen. Es soll die menschliche Interaktion dahingehend verbessern, die Kommunikation bei Veranstaltungen oder in interaktiven Lern- oder Bildungsprojekten zu bereichern und zu fördern, z.B. in Communities oder zwischen Mitgliedern einer definierten Gruppe.

Bild: Denso Robotics Europe / Denso Europe B.V.











