Forschungsprojekt feinfühliger Assistenzroboter
Einen Gegenstand entgegennehmen oder ihn einer anderen Person reichen: Für Menschen gehört das zu den natürlichsten Handlungen. Doch für Roboter ist es eine schwierige Angelegenheit.
")
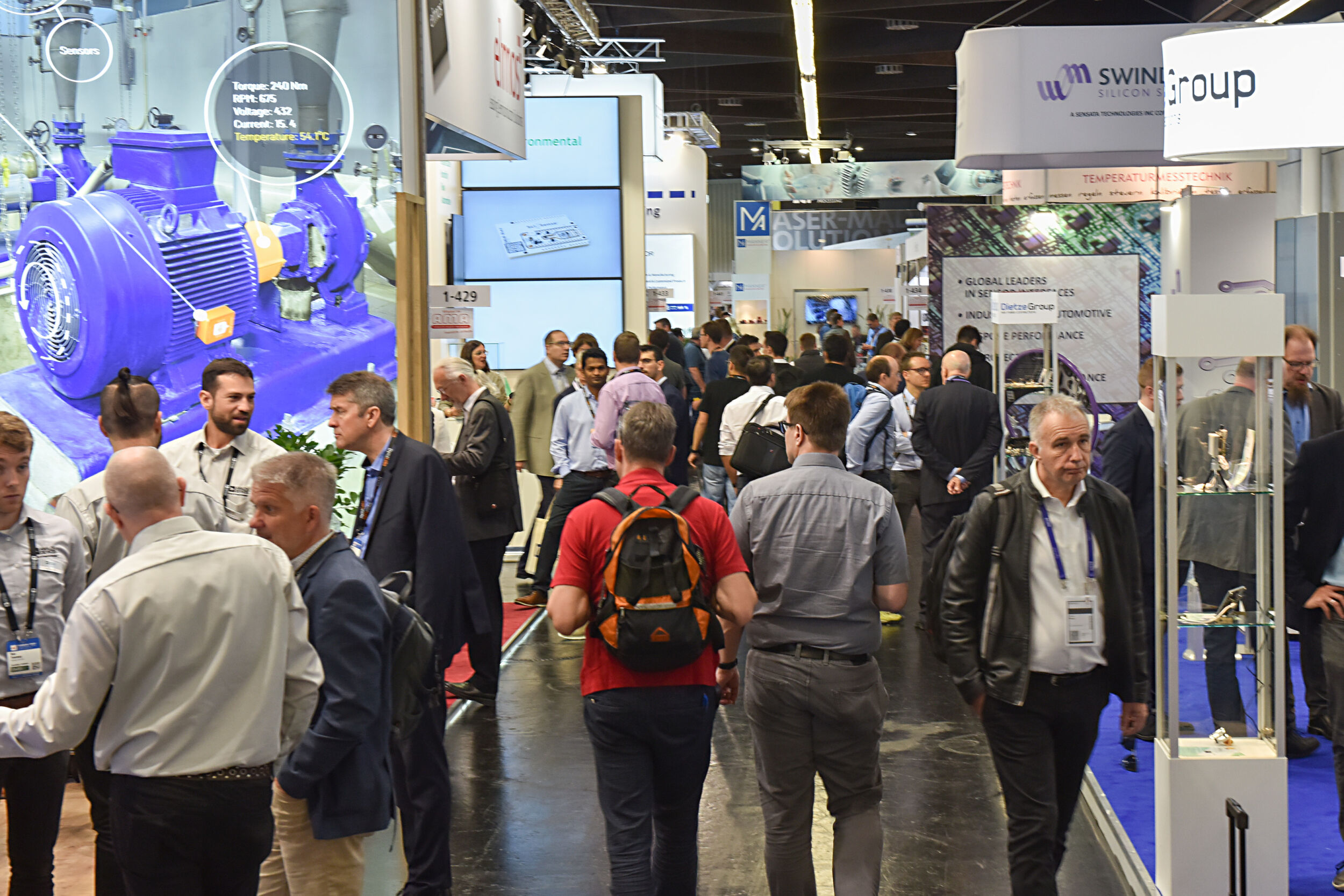
(Bild: Fraunhofer-Institut IPA)
Denn dafür ist nicht nur in Bezug auf die physische Interaktion eine gewisse Feinfühligkeit nötig: Wohin schaut der andere? Ist er ansprechbar? Menschen nehmen Signale, die die Aufmerksamkeit ihres Gegenübers reflektieren, unterbewusst wahr und verhalten sich entsprechend. Dieselbe Sensibilität auch Robotern beizubringen, daran arbeiten Forscher im Rahmen des neu gestarteten Projekts ASARob (Aufmerksamkeits-Sensitiver AssistenzRoboter). Konkretes Ziel des auf drei Jahre angelegten Forschungsprojekts ist es, die Steuerungssoftware mobiler Roboter so zu erweitern, dass diese den Aufmerksamkeitszustand ihres Gegenübers erfassen und bei Bedarf durch entsprechende Aktionen beeinflussen können. Als Testsystem für die exemplarische Umsetzung dieser Fähigkeiten dient der vom Fraunhofer IPA und Unity Robotics entwickelte Care-O-bot 4. Der mobile Assistenzroboter ist speziell für die Interaktion mit und die Unterstützung von Menschen in Alltagsumgebungen geeignet und lässt sich aufgrund seines modularen Aufbaus einfach an unterschiedliche Aufgaben anpassen.