Weiteren Raum erschließen
In einer Roboterzelle bleibt häufig der obere Bereich des kugelförmigen Arbeitsbereiches als erschließbarer Raum übrig. Beim Robot-Flexlinekonzept wird dieser Raum im Rahmen einer vollautomatischen Formatumstellung dazu genutzt, die Werkzeugablagen bei einem automatischen Werkzeugwechsel unterzubringen. Der Knickarmroboter wird mit einem automatischen Wechselflansch ausgestattet und ist aufgrund seiner Kinematik in der Lage, die Werkzeugwechselpositionen einfach zu erreichen. Die vollautomatische Formatumstellung wird somit wirtschaftlich umsetzbar.
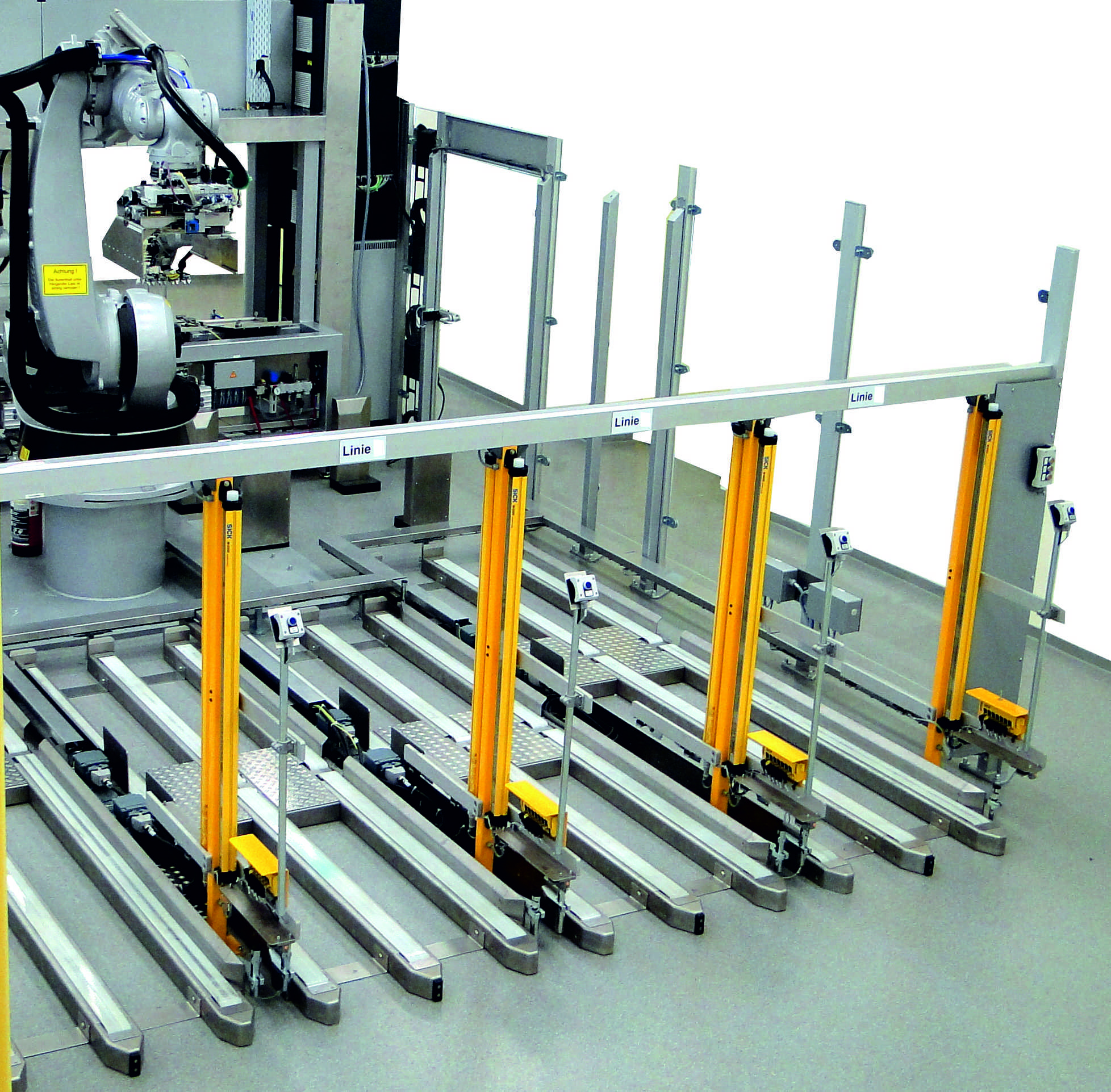
Das Robot-Flexlinekonzept eignet sich auch für die robotergestützte Palettierung. (Bild: Transnova-Ruf GmbH)
Fazit
Als Ergebnis lässt sich festhalten, dass sich das Konzept von Transnova-Ruf für eine Automatisierung der Endverpackung und Palettierung bei beengten Platzverhältnissen eignet. Das Unternehmen entwickelt und baut mit rund 260 Mitarbeitern Maschinen für die Automatisierung von End-of-Line-Verpackungs- und -Palettierprozessen. Von der einzelnen Kompaktmaschine für das Top- und Side-Loading über Pickersysteme für schnelle Pick&Place-Applikationen sowie Robotersysteme für Kommissionier-, Palettier- und Depalettieraufgaben bis hin zu kompletten Endverpackungslinien – auf Basis eines Modulbaukastens lassen sich maßgeschneiderte Lösungen in Design-to-Order realisieren.











