Kuka-Roboter verteilt Dosierlöffel für Babynahrung
Der Systemintegrator Modu System aus Malaysia setzt bei der Produktion von Dosierlöffeln für Babynahrung einen KR Delta von Kuka ein. Der Highspeed-Roboter in der Hygienic-Machine-Ausführung eignet sich gut, Dosierlöffel für Babynahrung schnell und hygienisch zu verteilen. Die Lösung befindet sich in Klang westlich von Kuala Lumpur.
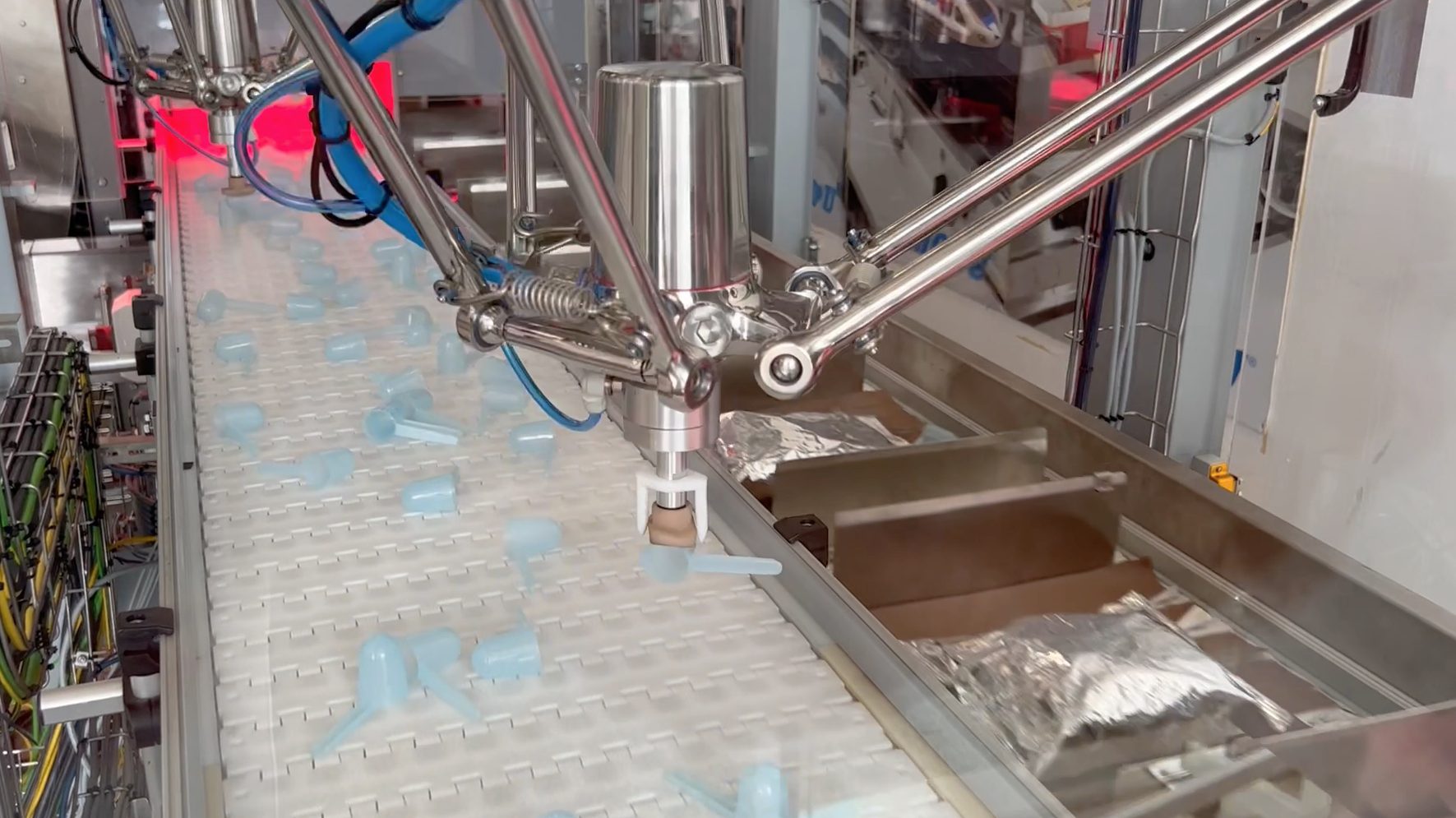
Bild: Kuka Deutschland GmbH
Zwei KR Delta greifen Dosierlöffel von einem Fließband und legen sie auf einem zweiten Band in offene Fördertaschen. Diese bestehen wiederum aus einem Lebensmittelbeutel mit Babynahrung. Neben dem Beutel befindet sich eine freie Fläche mit einem Aufkleber samt Strichcode. Erkennt der Roboter über die Kamera die freie Fläche, weiß er, dass er dort einen Löffel ablegen muss. Anschließend schiebt eine weitere Maschine Beutel und Löffel in eine Schachtel. Verdeckt der Beutel aber den Aufkleber, dann wird kein Löffel abgelegt, weil es sonst beim Verpacken zu einem Stau in der Maschine kommen kann.











