Mechanischer Greifer für geschlossene Räume
Beim SupraGripper von Festo schweben zwei Greifer mit je drei Fingern frei über zwei halbmondförmigen Platten. Mit dieser Technik lassen sich z.B. Objekte durch eine Abtrennung hindurch oder in geschlossenen Räumen greifen und transportieren, was sich für Reinräume anbietet oder für die Arbeit in Gasen, im Vakuum oder in Flüssigkeiten.
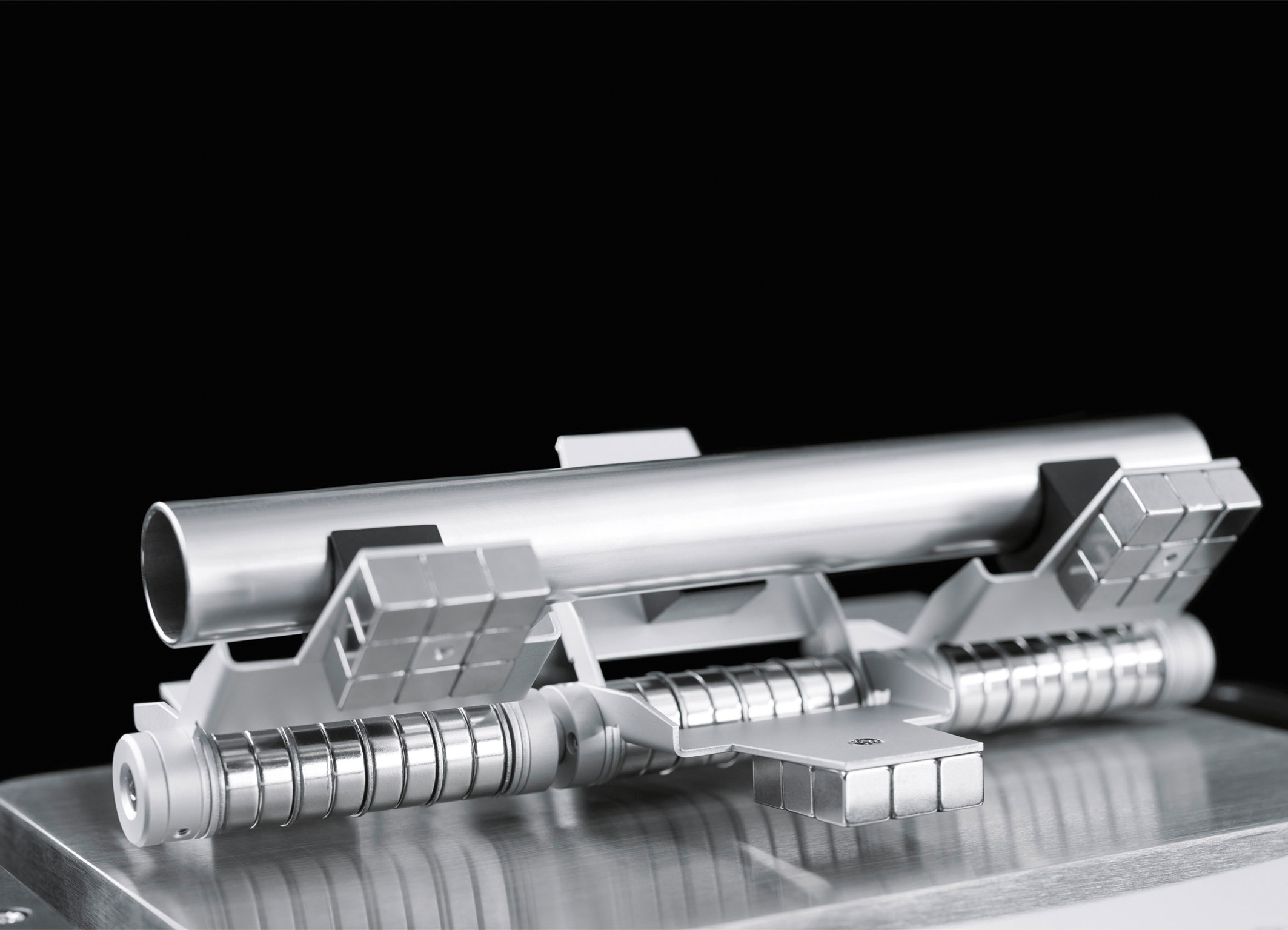
Beim SupraGripper schweben zwei Greifer mit je drei Fingern frei über zwei halbmondförmigen Platten. (Bild: Festo AG & Co. KG)
Der Schwebeeffekt lässt sich durch insgesamt drei Kryostate erzielen, die unterhalb der Platten verbaut sind und sich nach oben und unten fahren lassen. Dadurch schweben die Greifer entweder über den Platten oder werden auf ihnen abgelegt. Zusätzlich lassen sich die beiden Platten mithilfe von zwei Drehantrieben rotieren und gezielt positionieren, um die beiden Greifer von einem Kryostaten zum nächsten zu transportieren. Um ein Objekt zu greifen, geben auf den Kryostaten sitzende elektrische Spulen einen Impuls ab. Dieser löst bei Bedarf die gespeicherte Verbindung zu den magnetischen Greiferelementen oder stellt sie wieder her. Durch diesen Impuls klappen die einzelnen Fingerelemente nach unten oder oben, wodurch sich die Greifer öffnen oder schließen.











