Roboterbasiertes Entgraten mit Druckluftspindeln
Möglichkeiten und Grenzen
Metallverarbeitende Betriebe, insbesondere Automobilzulieferer, stehen seit jeher unter großem Kostendruck. Wer seine Produktion nicht ins Ausland verlagern will, versucht die Produktivität zu steigern. Großes Potenzial liegt dabei zweifellos in der Automatisierung der Produktionsprozesse. Eine kostengünstige Lösung hierfür ist das roboterbasierte Entgraten mit Druckluftspindeln.
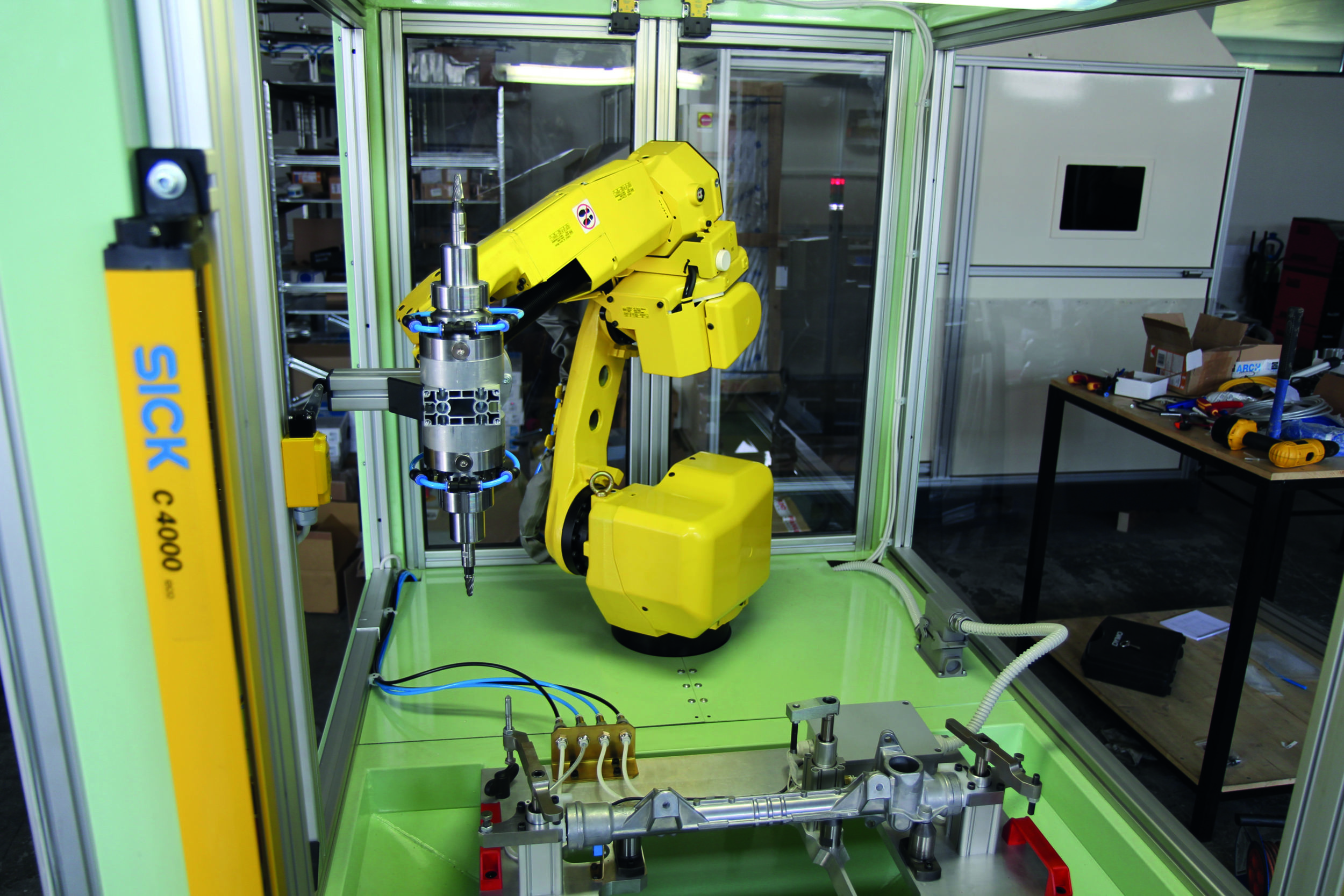
Entgraten mit fest installierter Schleifspindel mit Auslenkung. (Bild: Biax Schmid & Wezel GmbH & Co. KG)
Nachdem die größten Anwendungsfelder wie Schweißen oder Handling bereits weitgehend automatisiert sind, rücken vermehrt auch Nischenanwendungen wie etwa das Entgraten in den Fokus. Dieses gilt seit jeher als nicht wertschöpfend, lässt sich aber bei vielen Herstellungsprozessen nicht vermeiden. Eine der kostengünstigsten Automatisierungslösungen ist dabei das roboterbasierte Entgraten mit Druckluftspindeln. Auf diese Nische hat sich das schwäbische Familienunternehmen Schmid & Wezel spezialisiert, dass unter der Marke Biax Druckluftspindeln herstellt und vertreibt. Eines von vielen Beispielen für eine gelungene Prozessautomatisierung liefert die Firma IDS Casting Service. IDS ist ein Lohnfertiger, der täglich mehrere tausend Aluminium-Druckgussteile der Albert Handtmann Metallgusswerke in vier Roboterentgratzellen bearbeitet. Noch vor einigen Jahren wurde manuell entgratet, bis Reinhard Maier, kaufmännischer Leiter bei IDS, die Automatisierung selbst in die Hand nahm. Seither arbeitet das Unternehmen dreimal schneller und zweimal günstiger als von Hand. Hinzu kommt, dass es fast keinen Ausschuss mehr gibt und die Qualität des Arbeitsergebnisses konstant bleibt. Doch nicht jeder Betrieb verfügt über versierte Spezialisten und ausreichendes Know-How, um ein Automatisierungsprojekt aus eigener Kraft zu stemmen. In diesem Fall bietet sich die Zusammenarbeit mit externen Systemintegratoren an. In jedem Fall ist es hilfreich, einige grundsätzliche Dinge über das roboterbasierte Entgraten zu wissen.
Aufbau einer Entgratzelle
Die Entgratzelle mit Roboter ist normalerweise fester Bestandteil einer automatisierten Transferstraße. Die zu entgratenden Bauteile werden dabei automatisch dem Roboter zugeführt. Dieser greift dann Teil für Teil und führt es zu einer oder mehreren fest installierten Spindeln. Würde der Roboter die Spindel führen, müsste jedes einzelne Bauteil erst einmal fixiert werden, was einen unnötigen Zeitverlust darstellt. Daher findet das nur bei sehr großen Bauteilen Anwendung. Es werden bevorzugt druckluftbetriebene Spindeln eingesetzt, da sie im Vergleich zu Elektrospindeln deutlich preiswerter, vom Gewicht her leichter und kompakter sind. Auch lassen sich mit Druckluftspindeln viel höhere Geschwindigkeiten erzielen, als mit Elektrospindeln.
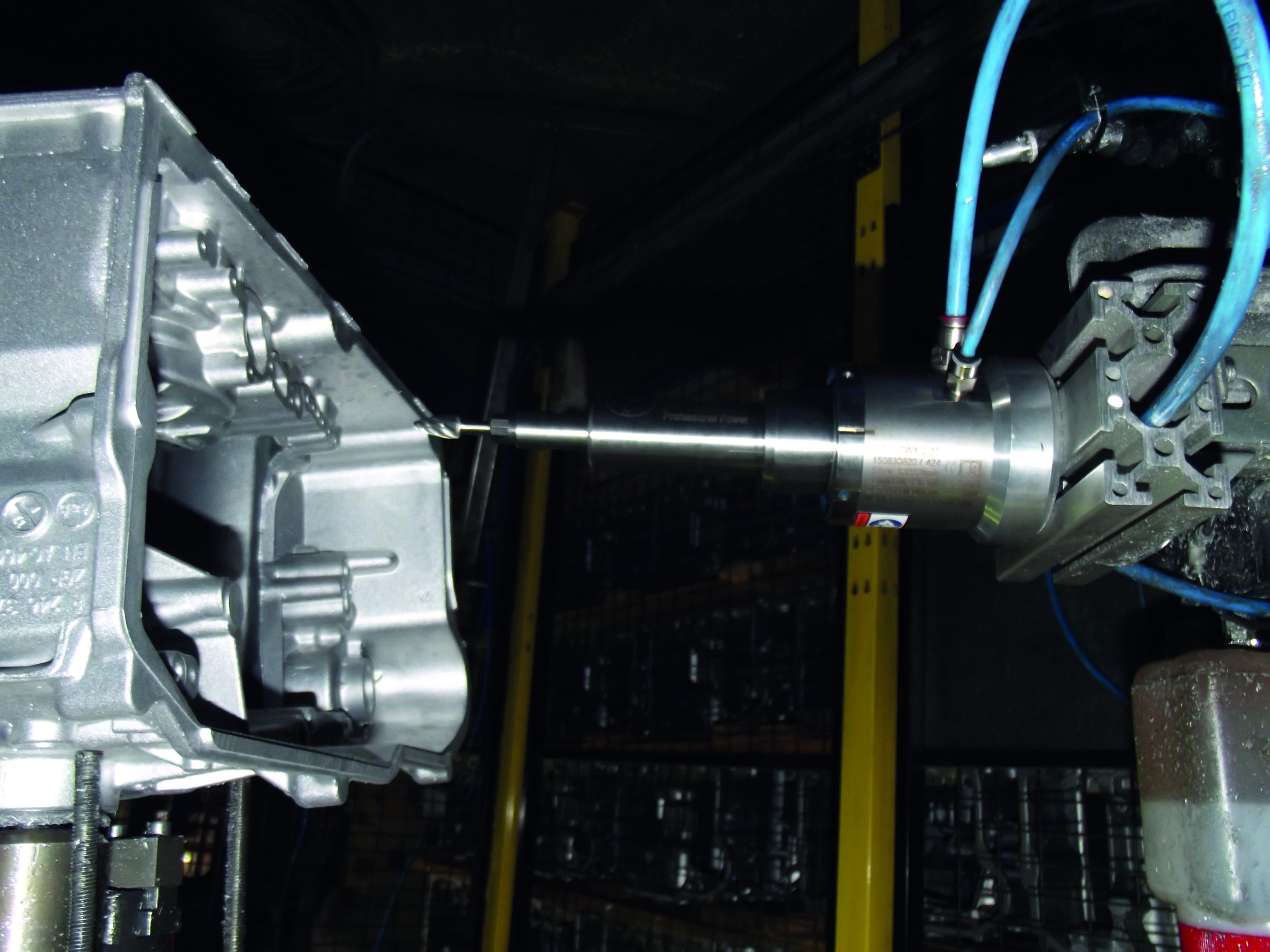
Der Roboter führt zwei Spindeln, das Bauteil wird jedes Mal neu gespannt. (Bild: Biax Schmid & Wezel GmbH & Co. KG)
Die verschiedenen Werkzeuge und Spindelarten
Grundsätzlich lassen sich, je nach Werkstück und gewünschtem Ergebnis, sehr unterschiedliche Bearbeitungswerkzeuge wie Frässtifte, Bürsten, Feilen, Senker und Schleifkörper einsetzen. Am häufigsten verbreitet ist sicherlich das Entgraten mit Frässtiften und Bürsten für feste bzw. lose Grate. Feilen kommen meist dann zum Einsatz, wenn nur ein sehr geringer Materialabtrag erlaubt ist. Senker werden zum Entgraten von Bohrungen verwendet. Die Spindeln können starr sein oder mit einer radialen bzw. axialen Auslenkeinheit eingesetzt werden. Die Auslenkeinheit wird insbesodere dann erforderlich, wenn Bauteiltoleranzen und Ungenauigkeiten in der Positionierung des Werkstücks ausgeglichen werden müssen. Ersteres ist gerade für Gussteile typisch, egal ob aus Metall, Kunststoff oder Faserverbundwerkstoff, da diese im Gegensatz zu Graten von bearbeiteten (zerspanten) Teilen in der Regel sehr ungleichmäßig sind. Die Auslenkung wird pneumatisch oder über Federpakete erzeugt, die Auslenkkraft lässt sich über Druck bzw. Federvorspannkraft einstellen.











