Anwendung mit Feingefühl
Mensch und Roboter fügen nun in weniger als einer halben Minute die Ausgleichsgehäuse für die Vorderachsgetriebe. Dabei werden die Komponenten über eine Förderstrecke automatisch zur Anlage gebracht und vom Werker vorbereitet. Er legt sämtliche kleinen und leichten Teile wie Ausgleichsscheiben und Kugellager in das Getriebegehäuse aus Alu-Druckguss und in den Deckel. Per Knopfdruck aktiviert er anschließend den Roboter, der das schwere Ausgleichsgehäuse vorsichtig einpasst. Dabei kommt es vor allem auf dessen feinfühlige Eigenschaften an. Denn die sensiblen Zahnflanken dürfen beim Einkämmen der Zahnräder nicht durch einen Stoß beschädigt werden. Danach befestigt der Werker den Deckel des Getriebes. In der Achsgetriebefertigung von BMW in Dingolfing ist dies die erste Arbeitsstation, an der Mensch und Roboter ganz ohne Schutzzäune und weitere zusätzliche Sicherheitstechnik ständig im selben Arbeitsraum zusammenarbeiten können. Auch hier wird es vermutlich nicht die einzige bleiben. Denn MRK erlaubt es, ergonomisch ungünstige Arbeitsschritte dem mechanischen Assistenten zu übertragen oder auch Montagearbeitsplätze an die Bedürfnisse einer alternden Belegschaft anzupassen. Auch die zukünftigen Anforderungen, die an die industrielle Fertigung gestellt werden, machen eine Kombination von manuellen und automatisierten Tätigkeiten immer attraktiver. In Zeiten steigender Variantenvielfalt wird es zum Wettbewerbsvorteil, wenn sich die Produktion flexibel an die jeweils benötigte Auslastung anpassen lässt – z.B. mithilfe moderner MRK-Einheiten.
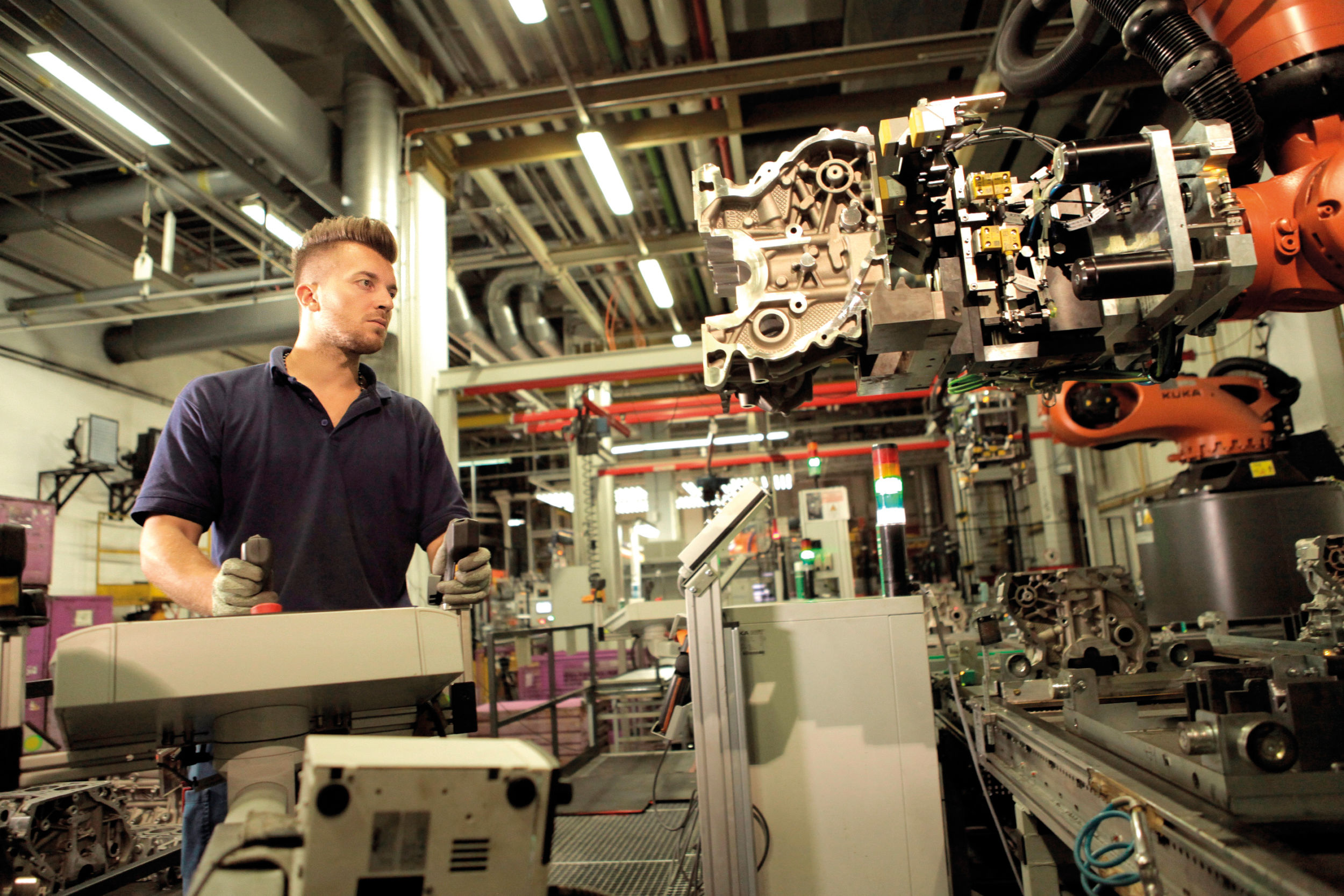
Der Mitarbeiter im BMW-Werk Landshut steuert den Kuka-Roboter mittels Joystick, um dann in einer ergonomischen Körperhaltung die Bauteile auf Fehler zu prüfen. (Bild: Kuka AG)
MRK in der Qualitätssicherung
Dass die Lösungsvielfalt weit über die Leichtbauroboter und spezieller MRK-Kinematiken wie den LBR iiwa hinaus geht, zeigt anschaulich eine Anwendung in der Leichtmetallgießerei des BMW-Werks Landshut. Dort werden Kurbelwellengehäuse für sämtliche Modelle der Flotte gefertigt. Weil es in der Qualitätssicherung des geschulten Blicks des Werkers bedarf, lässt sich der Prozess nicht vollständig automatisieren. Dennoch sollten die Mitarbeiter entlastet werden und nicht mehr die schweren Bauteile bewegen müssen. Der Auftrag lautete also, eine Anlage zu entwickeln, in der Mensch und Roboter direkt zusammenarbeiten. Realisiert wurden in der Folge zwei identische Applikationen mit jeweils einem KR-Quantec-Roboter für Traglasten bis 210kg vom Typ KR 210 R2900 Prime K (K steht für die Konsolenausführung) an der Produktionslinie. Ein Mitarbeiter steuert dabei mittels Joystick die Bewegungen des Roboters und kann dabei in einer angenehmen Körperhaltung die Bauteile auf Fehler prüfen.
Sicher und benutzerfreundlich
Über ein Förderband kommen alle produzierten Kurbelwellengehäuse in den Arbeitsbereich. Per Joystick führt der Werker den Roboter auf einer vorgegebenen Bahn zum Gehäuse, schließt den Greifer und reicht das Bauteil an. Nun prüft er es mittels Kaltlichtlampe auf Fehler. Währenddessen hält der Roboter das rund 30kg schwere Bauteil sicher in der für den Mitarbeiter passenden Höhe. Hat der Werker den Prüfvorgang abgeschlossen, fährt er den Roboter samt Gehäuse zurück zum Förderband und legt es ab. Drei voneinander unabhängige Safety-Vorrichtungen sorgen für entsprechende Sicherheit: eine Sicherheits-SPS, die auch den Greifer sicher steuert, eine sichere Robotersteuerung, die den Roboter nur bestimmte Geschwindigkeiten in Arbeitsräumen ausführen lässt, sowie ein Zustimmtaster. Damit sich der Roboter überhaupt bewegt, muss der Mitarbeiter den Zustimmtaster gedrückt halten. Lässt er los, stoppt der Roboter augenblicklich. Ferner ist die Steuerung des Roboters unkompliziert: Drückt oder zieht der Mitarbeiter den Joystick-Griff nach vorne/hinten, bewegt sich der Roboter in eine parametrierte Richtung. Drückt er ihn nach links oder rechts, orientiert sich der Roboter ebenfalls entsprechend um. Über ein Daumenrad kann zudem die Höhenverstellung des Kurbelgehäuses relativ zum Werker vorgenommen werden.











