Präziser Greifer für die Verpackungsindustrie
Der Greifer RL7 von Soft Robotics ist in der Lage, Bewegungen auszuführen, die Menschen zahllose Male am Tag durchführen. Der Greifer nimmt auch weiche Objekte zuverlässig auf und legt sie an einem definierten Ort ab – und zwar ohne, dass die Objekte erst mit einem Vision-System identifiziert oder einprogrammiert werden müssen.
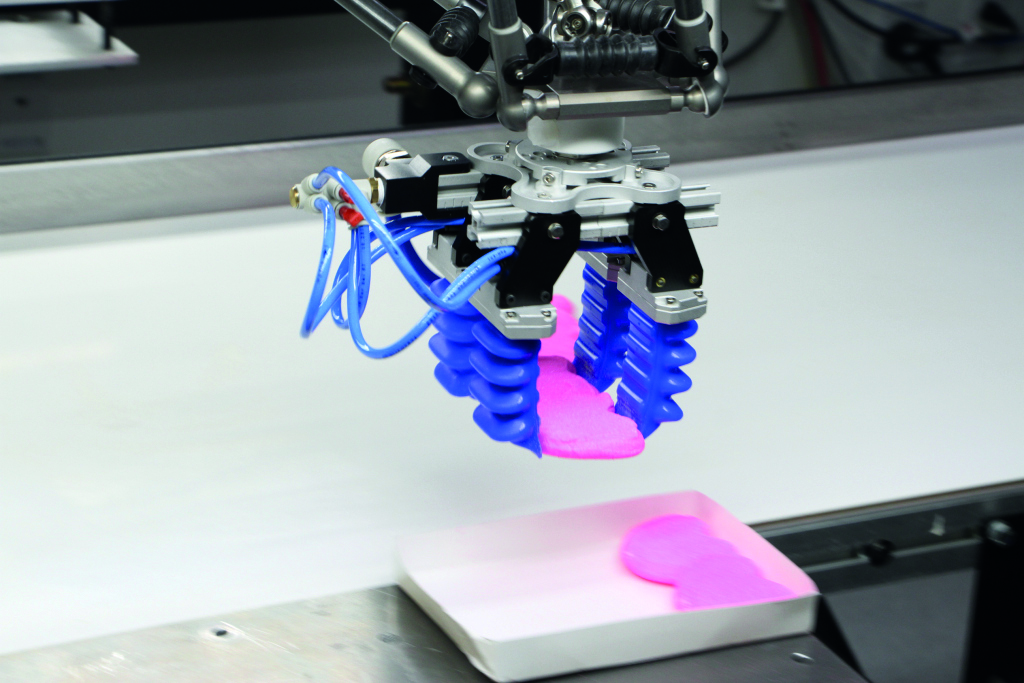
Der Polymergreifer RL7 von Soft Robotics eignet sich zum Greifen verformaberer Güter. (Bild: Soft Robotics Inc.)
Die Polymergreifer kommen in der Verpackungsindustrie zum Einsatz und eignen sich zum Greifen und Verpacken von verformbaren Gütern, wie Schokolade oder Pizzateig. Sie orientieren sich im Design nicht an der menschlichen Hand, sondern erinnern mit ihren vier Fingern eher an die Tentakel eines Oktopus. Tests im Labor zeigten, dass die Greifer so präzise agieren, dass sie selbst eine lebende Maus oder ein rohes Ei greifen können, ohne diese zu beschädigen.











