Kontaktlose Energieübertragung mittels induktiver Nahfeldkopplung
Roboter allein unterwegs
Kontaktlose Energieübertragung mittels induktiver Nahfeldkopplung ist seit über 120 Jahren bekannt. Vor allem für Industrie 4.0 wäre das Konzept, das mobile Roboter ohne Kabelanschluss autark in Produktionshallen herumfahren ließe, sehr nützlich. Jedoch sind die herkömmlichen Technologien dafür nicht geeignet.
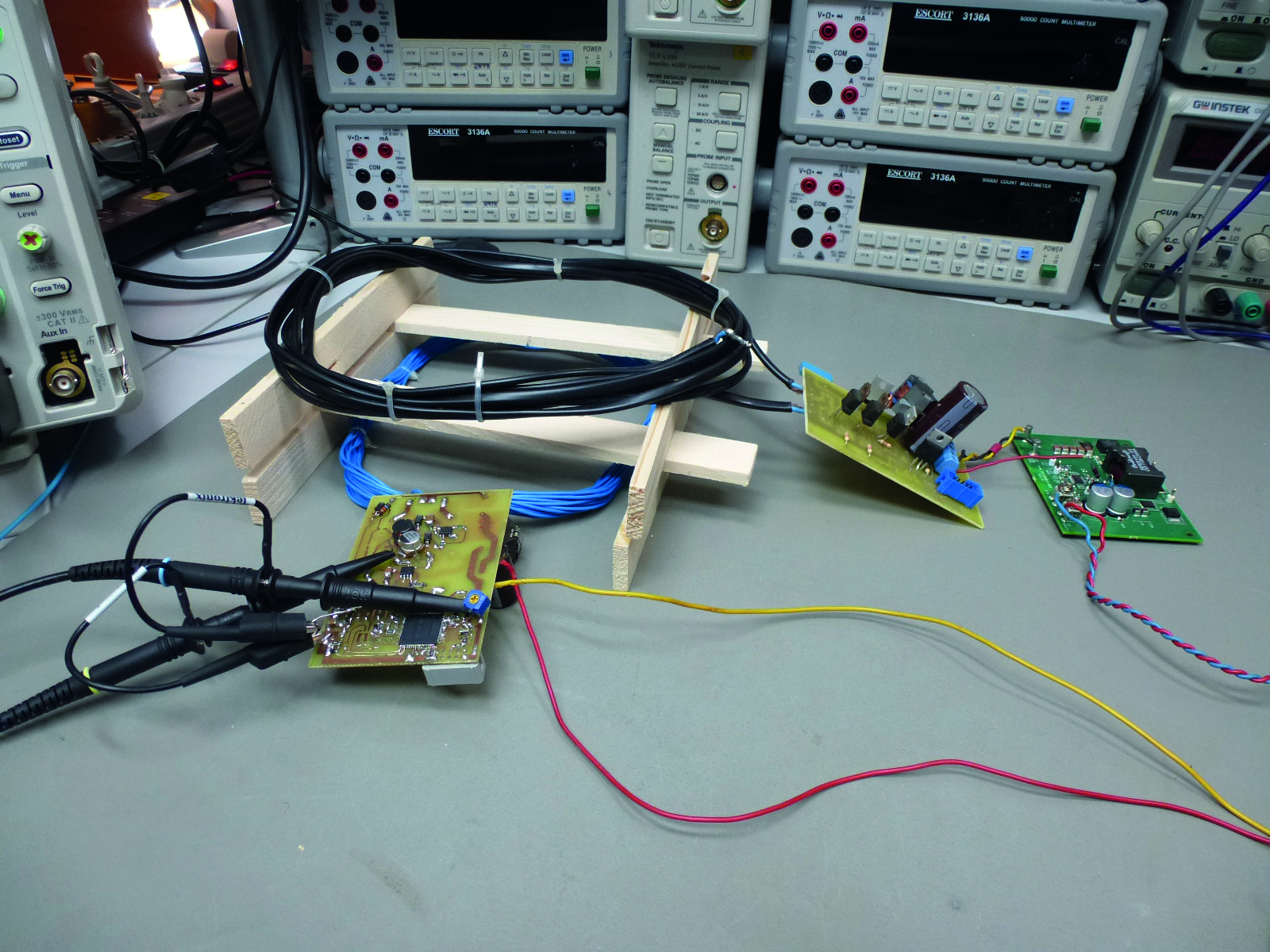
Das Funktionsmuster UniWP beinhaltet eine Sendeeinheit mit blauer Testrahmenantenne, eine Empfangseinheit mit schwarzer Antenne, eine Synchrongleichrichtung und ein Buck-Boost-Wandler für eine geregelte Ausgangsspannung von 24V. (Bild: IBR Ingenieurbüro Rehm)
Bei drahtloser Energieübertragung lässt sich der höchste Wirkungsgrad erzielen, wenn gekoppelte Resonanzkreise in Sendeempfangsystemen zum Einsatz kommen und auf ihrer gemeinsamen Resonanzfrequenz betrieben werden. Dabei muss die Betriebsfrequenz gleich der Resonanzfrequenz sein. Alle bekannten Ansätze betreiben die gekoppelten Resonanzkreise immer unterkritisch, um überkritische Kopplung zu vermeiden. Eine kritische Kopplung, die das physikalische Optimum bedeutet ist bei den herkömmlichen Lösungen praktisch nicht möglich.
Linearer Ansatz zur Frequenzsteuerung
Die neue Technik UniWP umfasst mehrere Teilblöcke, darunter einen Großsignal-VCO, der Teil eines PLL ist. Die Sendeeinheit arbeitet in einer Frequenz bzw. Phasenschleife, die über den Resonanzkreis geschlossen ist. Wenn sich der Primär- oder Sekundärresonanzkreis verstimmt oder wenn sich die Kopplungsbedingungen oder die Last der Sekundärseite ändern, wird die Resonanzfrequenz immer auf die gewünschte Spektralposition geregelt. Dieser neue lineare Ansatz zur Frequenzsteuerung hat ein Ansprechverhalten von einer halben Resonanzkreisperiode und ermöglicht die PLL innerhalb weniger Resonanzkreisperioden zu schließen. Das resultiert in einem Ausgangsspektrum, das die Genauigkeit einer beliebigen Referenzfrequenz aufweist. Ein Überkopplungsdetektor im Sender und im Empfänger detektiert Überkopplung und reduziert die Last. Auf diese Weise lassen sich beliebige Lasteinheiten mit hohen bzw. niedrigeren Kopplungen und Sekundärgüten flexibel dimensionieren. Der Überkopplungsdetektor der Lasteinheit spricht immer vor dem Überkopplungsdetektor in der Sendeeinheit an. Auf diese Weise entkoppeln sich immer zuerst die Lasteinheiten. Die Redundanz dieses Blocks in der Sendeeinheit gewährleistet einen Softstart und garantiert den Betrieb im Fehlerfall in der Lasteinheit oder auch, wenn die Lasteinheit keinen Überkopplungsdetektor enthält.
Großer Wirkungsgrad und erweitertes Spektrum
Wenn das Resonanznetzwerk in der Frequenz bzw. Phase in Resonanz betrieben wird, ist die gesamte Übertragungsstrecke als reeller Transformator zu betrachten und ergibt automatisch eine Anpassung, da nur die reelle Last zur Sendeeinheit transformiert wird. Dafür ist die Harmonischenunterdrückung durch die tiefere Filterselektion niedriger. Somit sind die Kosten gering und es lässt sich eine hohe Flexibilität durch einfaches Softwaredesign erreichen. Durch die hohe Dynamik von UniWP mit Großsignalresonanzsteuerung lässt sich ein beliebiges Frequenzspektrum per Softwaresteuerung bewirtschaften. Die spektrale Leistungsdichte durch Spreizung ergibt 10dB weniger Störpegel bei gleicher Sendeleistung. Dadurch lassen sich die EMV-Normen besser einhalten. Da nur der Maximalpegel genormt ist, kann das Konzept durch Sweepen zudem mehr Energie übertragen.











