Roboter drucken Sitzheizungen und Antennen
Im Forschungsprojekt ‚Robotergeführter Inkjet-Druck von funktionalen Schichten auf dreidimensionale (3D)-Objekte‘ (kurz 3D-Robojet) haben Wissenschaftlerinnen und Wissenschaftler des Fraunhofer ENAS und der TU Chemnitz einen Versuchsstand für robotergeführten Inkjet-Druck aufgebaut und konnten mit diesem unter anderem eine Sitzheizung auf einer Kunststoffsitzschale herstellen.
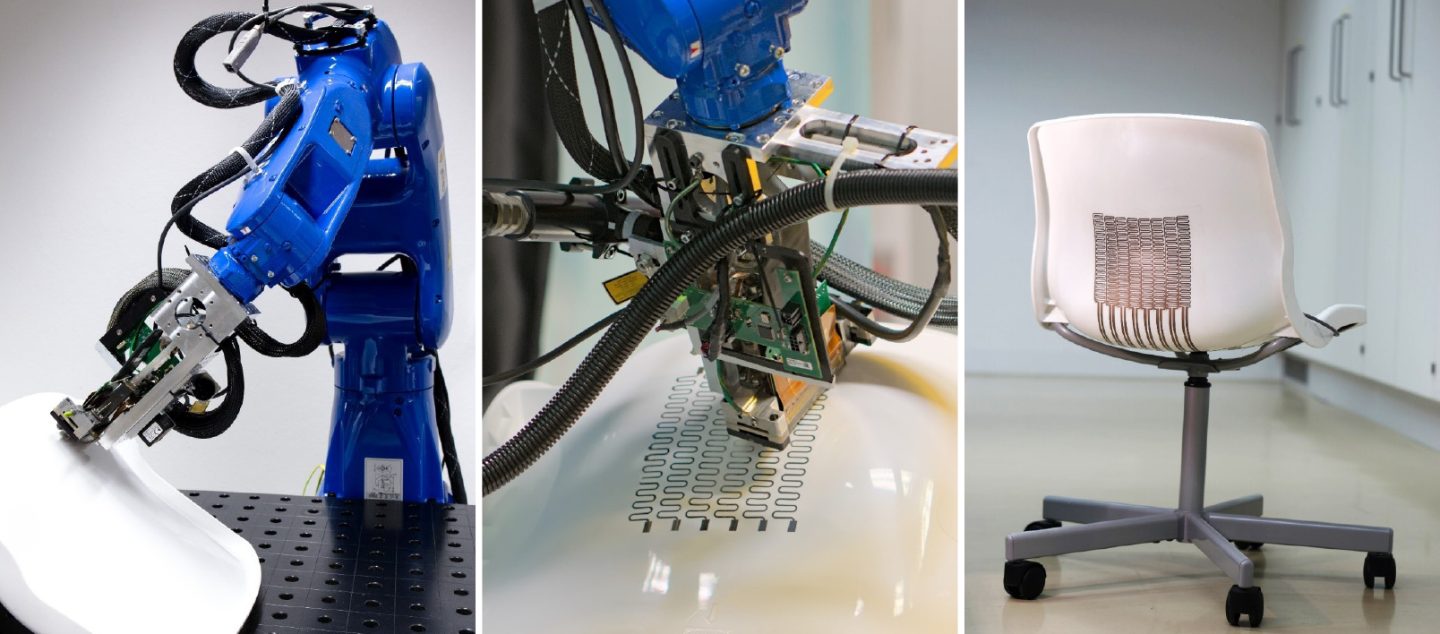
Bild: Fraunhofer ENAS
Zielstellung des Projekts war der Aufbau eines Versuchsstandes mit einem Sechsachs-Industrieroboter in Kombination mit einem Inkjet-Druckkopf und dessen Validierung anhand gedruckter funktionaler Anwendungsbeispiele. Der modulare Aufbau der Anlage gestattet es, weitere Funktionen wie die Vorbehandlung mit Plasma, die Nachbehandlung mit ultraviolettem und infrarotem Licht sowie die Objekterkennung mit Hilfe einer 3D-Tiefenkamera und eines Triangulationssensors zu integrieren. Um später mit der Anlage beliebige Druckbilder zielgenau auf Objektoberflächen erzeugen zu können, entwickelte die Professur für Robotik und Mensch-Technik-Interaktion der TU Chemnitz die Robotersteuerung anhand eines mehrstufigen Algorithmus zur Bahnplanung und -steuerung auf Basis von Voxelkarten. Somit kann dasselbe Objekt unabhängig von seiner Lage im Raum bedruckt werden.











