Säge/Roboter-Lösung mit Knickarmroboter
Die Säge/Roboter-Lösung mit Knickarmroboter von Ima Schelling ist abgestimmt auf die Aufteilsäge fm 6. Mithilfe des Roboterarms mit variabler Vakuumlastaufnahme erweitert sie manuelle Anlagen zu automatisierten Bearbeitungszellen. Zuschnitte mit hohem Handling-Aufwand lassen sich so vollautomatisiert durchführen.
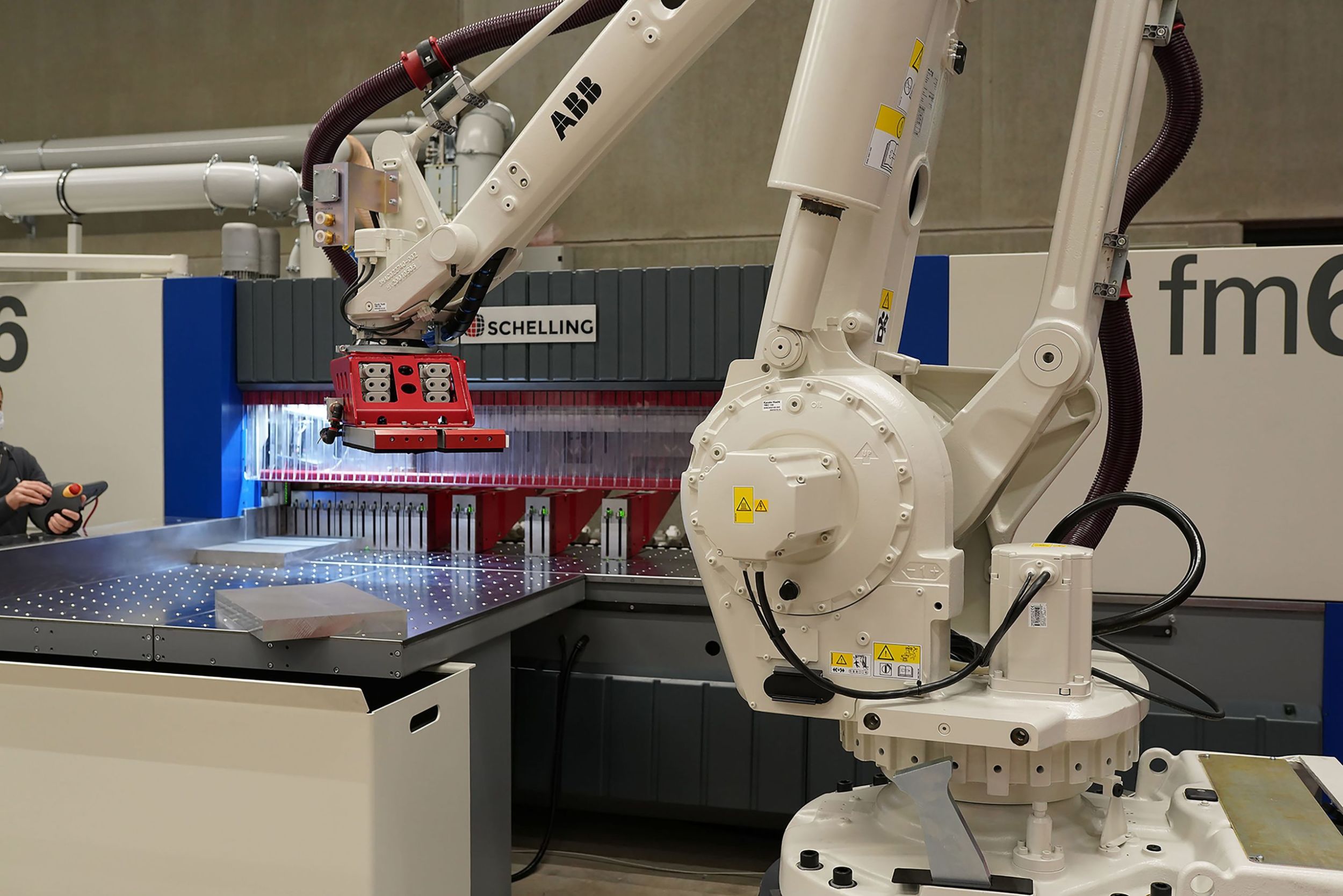
Bild: IMA Schelling Deutschland GmbH
Freiwerdende Ressourcen können im Betrieb anderweitig eingesetzt werden. Zuführung und Handhabung an der Säge erfolgen automatisiert und oberflächenschonend auf einer Luftkissenmanipulierfläche. Zuschnitte und Reststücke stapelt die Säge/Roboter-Lösung automatisiert ab. Nicht weiter verwertbare Zuschnittreste sortiert die Anlage nach Legierungen getrennt in separate Container. Der Automatisierungsgrad lässt sich nach Kundenwunsch individuell gestalten.











