Sawyer an der Eismaschine
Im neusten Projekt von ITQ, dem ‚Intelligenten Fwip Ice Demonstrator‘, bedient der Roboter Sawyer von der Rethink Robotics die IoT-Eismaschine Portobello mit Kapselsystem von Fwip. An dem Projekt haben zwei junge Studierende teilgenommen. Ihre Aufgabe bestand darin, die Eismaschine mit Motoren und Sensoren auszustatten und die Bedienung mit Hilfe von Robotertechnik und Software zu ermöglichen.
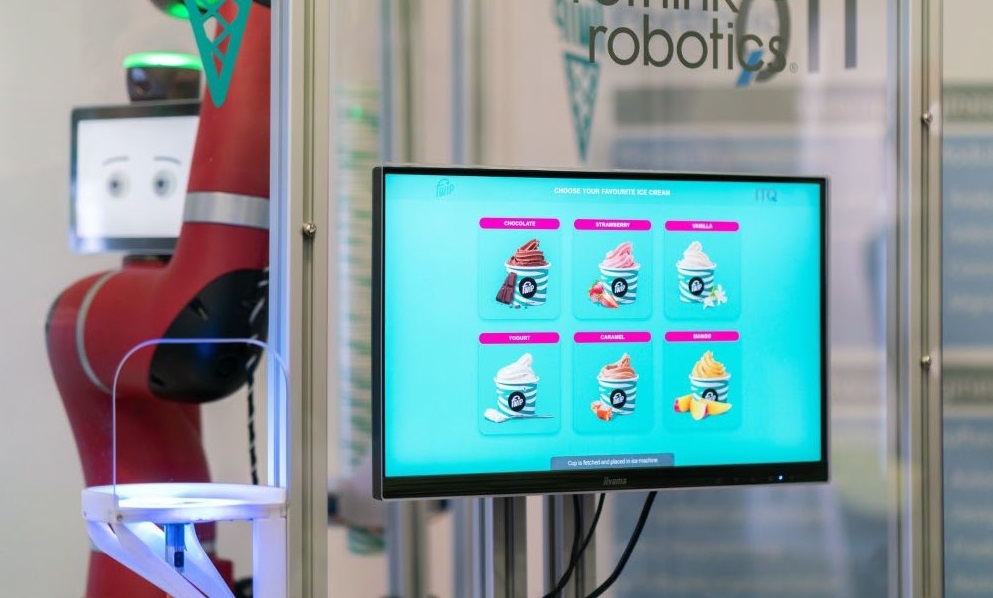
Bild: Rethink Robotics GmbH/ITQ GmbH
Über ein Display wählt der Benutzer eine Eissorte aus. Dann setzt sich der Roboterarm in Bewegung und bearbeitet die Bestellung. Er holt mit einer Greifhand einen Eisbecher aus der Vorrichtung und stellt ihn in die Eismaschine. Anschließend entnimmt er mittels Vakuumgreifer eine Eiskartusche aus der Kühlarmatur und platziert diese in die Schublade der Eismaschine. Nach dem Start bereitet die Eismaschine das Eis zu, das der Roboterarm an der Ausgabestelle des Demonstrators serviert.











