Visualisierungs-Tool für Transportsysteme
Mit einem neuen Visualisierungs-Tool will B&R die Entwicklung von Automatisierungslösungen mit dem Transportsystem SuperTrak beschleunigen. Das Tool visualisiert die simulierte Bewegung aller Shuttles und synchronisierter Subsysteme wie Robotik und CNC in 3D. Maschinenbauer und -betreiber können ihre Maschinenkonzepte und Ablaufprogramme vorab validieren und die Inbetriebnahme ihrer Maschinen beschleunigen.
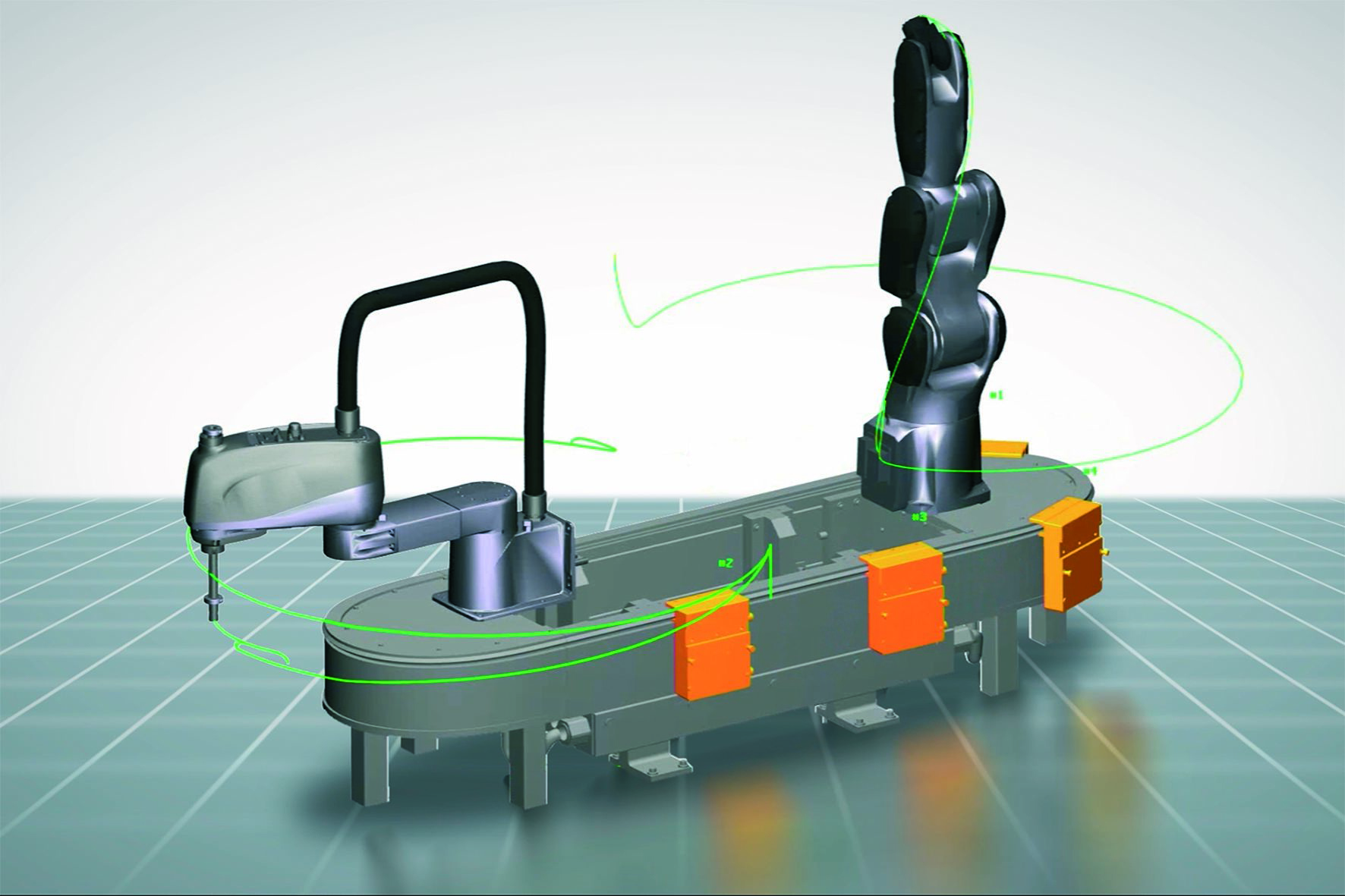
Mittels 3D-Simulation wird das Verhalten der Shuttles in Verbindung mit synchronisierten Subsystemen wie Robotik und CNC nachgebildet. (Bild: B&R Industrie-Elektronik GmbH)
Das Visualisierungstool und umfangreiche Simulationsmöglichkeiten sind vollständig in die Automatisierungssoftware Automation Studio integriert. Alle Simulationen basieren auf realem Maschinencode. Zusätzliche Software und Schnittstellen sind nicht notwendig. Im Simulationsmodus erfolgt die 3D-Visualisierung in der Entwicklungsumgebung, sodass sich der Prozess bereits vor der Inbetriebnahme verbessern lässt. Anschließend wird der Maschinencode mit wenigen Klicks auf die Ziel-Hardware übertragen. Zur Laufzeit verarbeitet das Visualisierungs-Tool Sensorsignale in Echtzeit und ermöglicht die Darstellung der Maschinenbewegungen auf der Maschinenvisualisierung.











