Vorstellungen greifbar machen
Fertigen Sie bereits flexibel in Losgröße 1? Finden Sie noch Mitarbeiter für stupide Bestückungsarbeiten? Ihre konkrete Vorstellung ist der automatisierte „Griff in die Kiste“, in einer flexiblen Roboterzelle- angepasst auf Ihre Produktionsbedingungen!
Sie sind skeptisch, ob diese Lösung das Richtige für Ihr Unternehmen ist? Greifen Sie auf das branchenübergreifende Prozesswissen von Ulrich Rotte Anlagenbau und Fördertechnik zurück. Das Unternehmen hat sich eine kundenindividuelle Automatisierung von Produktionsprozessen zur Firmenphilosophie gemacht. Eine ausgeprägte Kompetenz im Bereich der Bin-Picking-Technologie gehört ebenfalls dazu.
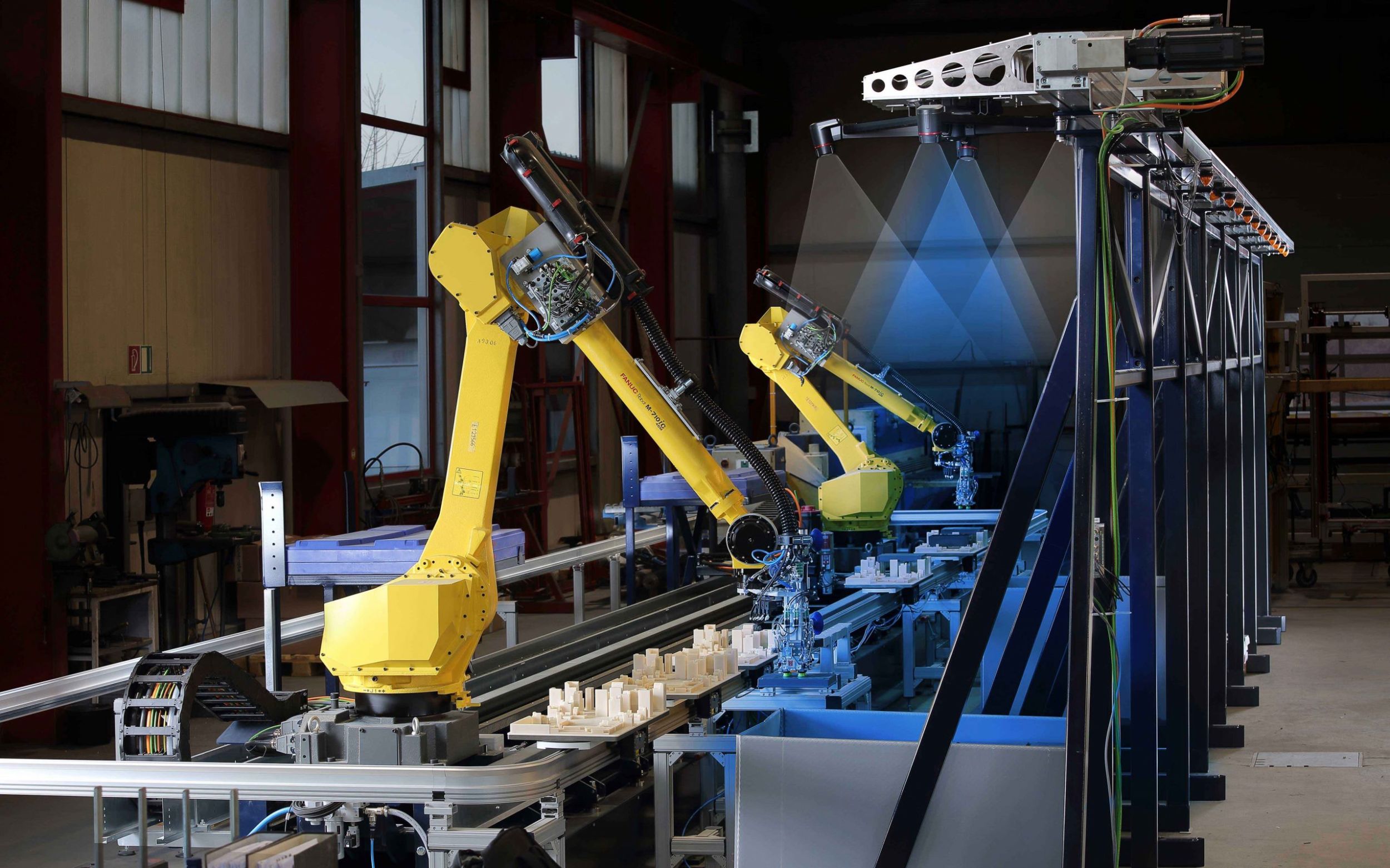
Bild: Ulrich Rotte Anlagenbau und Fördertechnik GmbH
Komplexität greifbar machen
Da der sogenannte Griff in die Kiste zu den schwierigsten Aufgabenstellungen in der Robotik zählt, werden im Rotte- Technikum während der Projektierung Machbarkeitsstudien an den Werkstücken durchgeführt. In der eigens dafür entwickelten Roboterzelle wird geprüft, ob der Roboter so programmiert werden kann, dass unsortierte kundenspezifische Produkte aus Kisten oder Gitterboxen gegriffen werden können. Dabei müssen die teils chaotisch liegenden Teile einzeln als solche erkannt und lokalisiert werden. Der Roboter und sein Greifer benötigen außerdem eine geeignete Greifposition für das am günstigsten liegenden Teil. Bei der Prüfung der Machbarkeit gibt es verschiedene Testszenarien, wie das Zuführen, Bestücken oder Einlagern. Alle Ergebnisse werden protokolliert, Taktzeiten werden analysiert und ein Lösungskonzept erarbeitet.
Für jede Vorstellung etwas dabei
Bei Ihrer Anwendung sind kurze Taktzeiten notwendig? Wir konstruieren den Bin Picking Prozess dahingehend, dass innerhalb der Taktzeit mit dem Roboter und der Kamera gleichzeitig gearbeitet werden kann. Der Vorteil ist, dass die Bildinformationen unabhängig vom Roboter aufgenommen werden, was zu großen zeitlichen Einsparungen führt. Für Kundenanwendungen, die aufgrund der räumlichen oder fertigungsspezifischen Gegebenheiten auf kompaktere Lösungen angewiesen sind, bieten Robot-Vision-Systeme, die direkt am Handgelenk des Roboters installiert werden, eine mögliche Alternative. Durch die stetige Weiterentwicklung können mittlerweile viele Sensoren auch schwer erkennbare Objekte, die glänzende, mehrfarbige oder semitransparente Teile enthalten, erkennen und bieten so neue Möglichkeiten für visuelle Applikationen.
Sie haben Fragen oder Interesse an einer Machbarkeitsstudie für Ihre Produkte? Dann kontaktieren Sie uns jetzt! Wir freuen uns auf den Austausch.
Kontakt. Benedikt Rotte, geschäftsführender Gesellschafter benedikt.rotte@ulrich.rotte.de. Tel. 05258 9789-0











