Werkzeuge für die automatisierte Oberflächenbearbeitung
Schunk hat sein Portfolio um Werkzeuge für die robotergestützte Oberflächenbearbeitung erweitert. Die neuen Bearbeitungswerkzeuge sind speziell auf automatisierte Anwendungen ausgelegt. Der Exzenterschleifer AOV eignet sich für das Schleifen und Polieren von Werkstückoberflächen. Die pneumatische Einheit wird von einem Lamellenmotor mit einer maximalen Drehzahl von 10.000 Umdrehungen pro Minute angetrieben. Die axiale Lagerung des Motors stellt eine Nachgiebigkeit sicher, sodass an der Werkstückoberfläche konstante Anpresskräfte wirken.
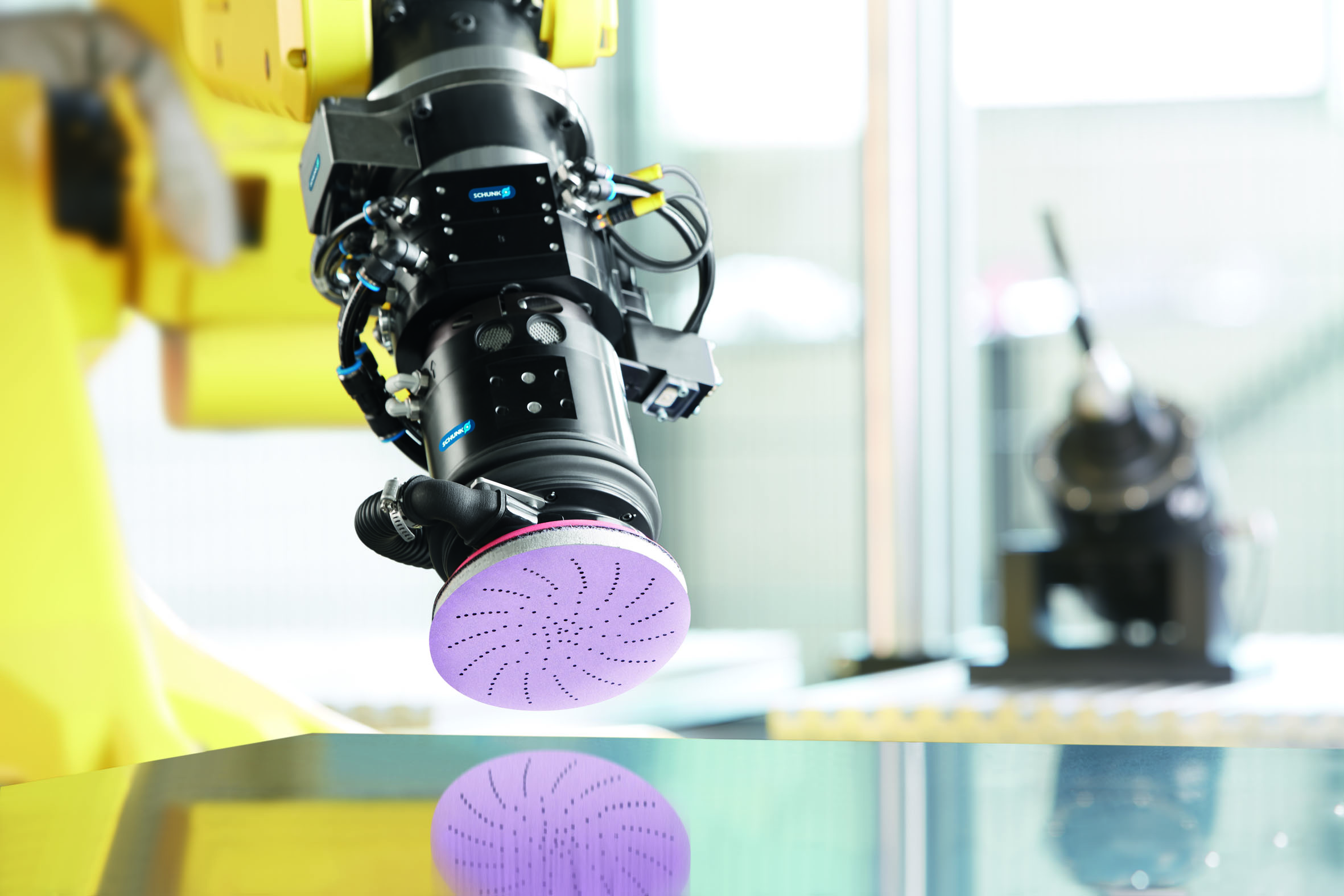
Bild: Schunk GmbH & Co. KG
Anwender, die eine besonders flexible und robuste Polierspindel für das Polieren und Bürsten von Werkstücken mit axialer Nachgiebigkeit benötigen, finden mit der MFT-R die passende Lösung. Die Spindel ist mit einem pneumatischen Lamellenmotor ausgestattet, der eine maximale Drehzahl von bis zu 5.600 Umdrehungen pro Minute leistet. Für die Finalisierung der Oberflächen lässt sich die Drehzahl verringern. Die Ausgleichseinheit PCFC stellt sicher, dass in jeder Lage eine konstante Ausgleichskraft wirkt. Möglich wird das durch einen Lagesensor, der zusammen mit kundenseitigen Druckregelventilen die Gewichtskraft kompensiert.











