Konfigurator für Portalroboter von Igus
Mit dem neuen Portalkonfigurator von Igus lässt sich ein Portalroboter in fünf Minuten online konfigurieren und programmieren. Der Nutzer erhält sofort den Preis, kann Funktionstests in der Augmented Reality durchführen und CAD-Daten mit technischer Zeichnung herunterladen.
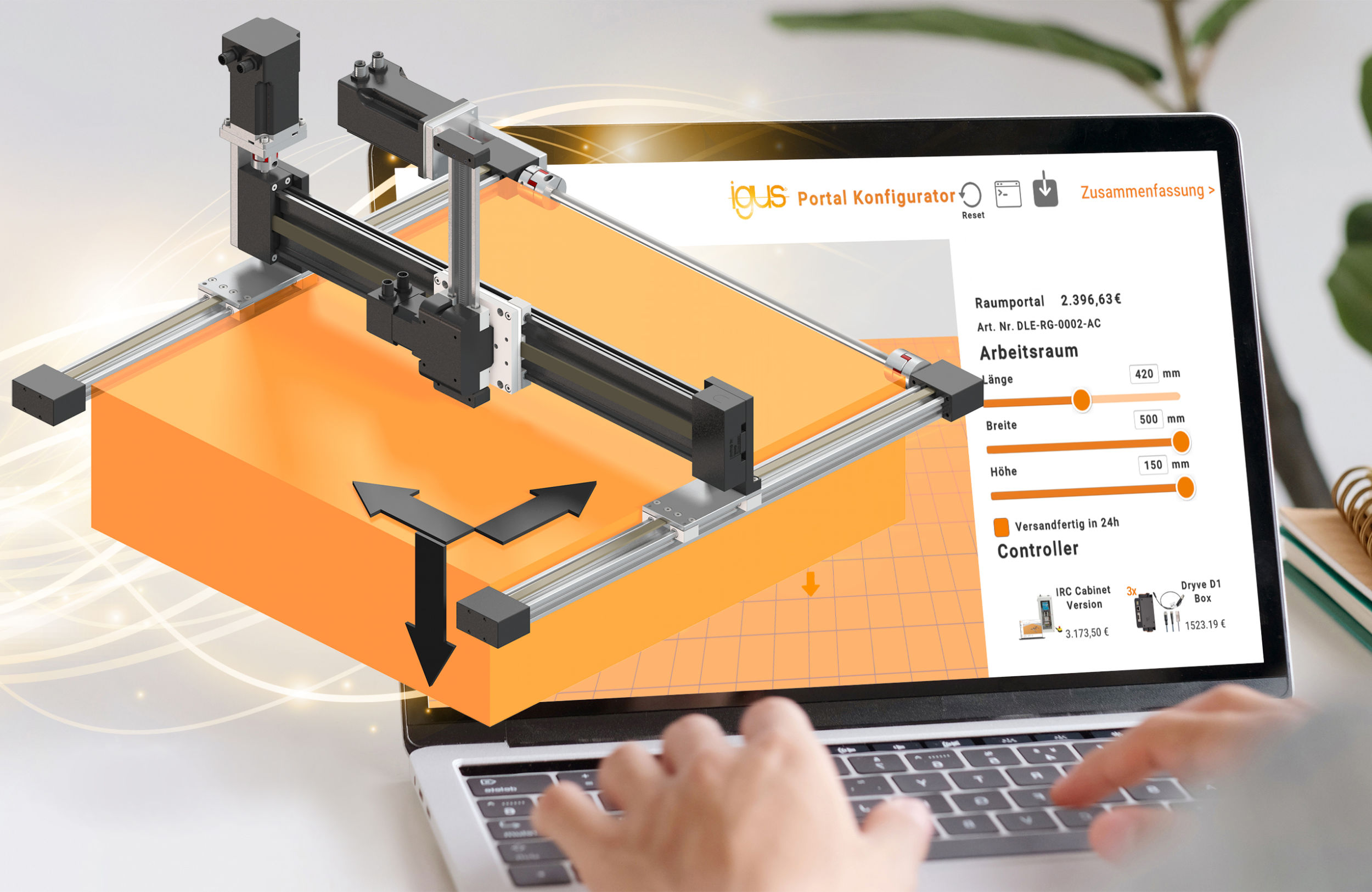
Bild: Igus GmbH
Das Tool ist angebunden an den Robotikmarktplatz RBTX und eignet sich für Linienportale, Flächenportale und Raumportale der Drylin-Serie. Hierfür wird lediglich ein Browser mit Internetzugang benötigt. Über virtuelle Schieberegler legt der Anwender die gewünschten Hublängen fest und sieht das 3D-Modell des Portals, das sich in Echtzeit den Schiebereglerveränderungen anpasst, in einer 360°-Ansicht von allen Seiten.











