Mobile Einheit mit zwei Cobots
Für die aufwendige Produktion von speziellen Zangen in der Medizintechnik hat Atec den mobilen Montageroboter MMR2 entwickelt. Aufgabenstellung war die automatisierte Montage von insgesamt drei Einzelteilen aus Kunststoff und Metall.
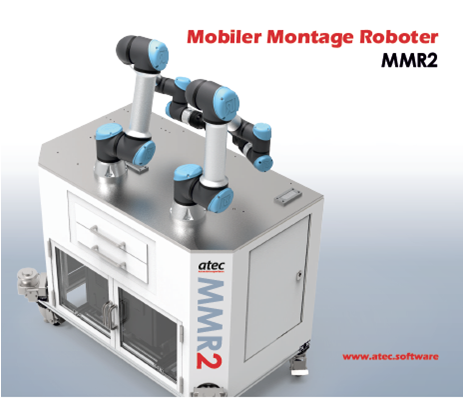
Bild: Atec GmbH Automatisierungssoftware
Durch zwei UR-Roboter werden die Zangen nun im 10s-Takt montiert. Die Zuführung der Einzelteile erfolgt sowohl als Schüttgut über einen Feeder als auch über ein Förderband direkt aus der vorgelagerten Spritzgussmaschine. Die Roboter greifen die Teile lagegenau und legen sie in die Montagestation ein. Der Roboter wird im Reinraum eingesetzt und kommt ohne Einhausung aus: Der Einsatz von zwei Laserscannern sorgt für sicheren Betrieb. Der MMR2 hat ein Gewicht von 250kg, Abmessungen von 120x70x95cm und ist auf vier Rollen mobil.











