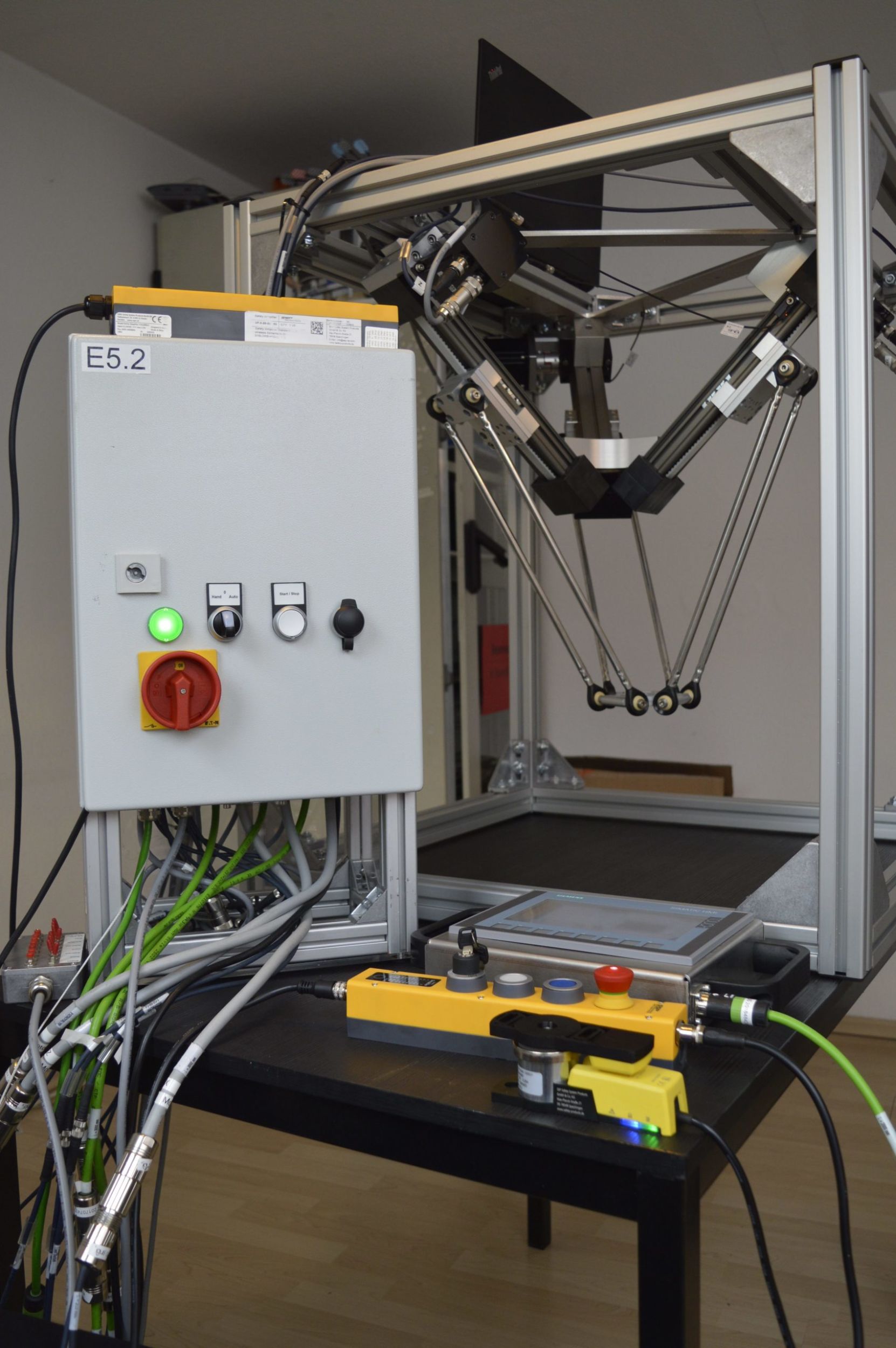
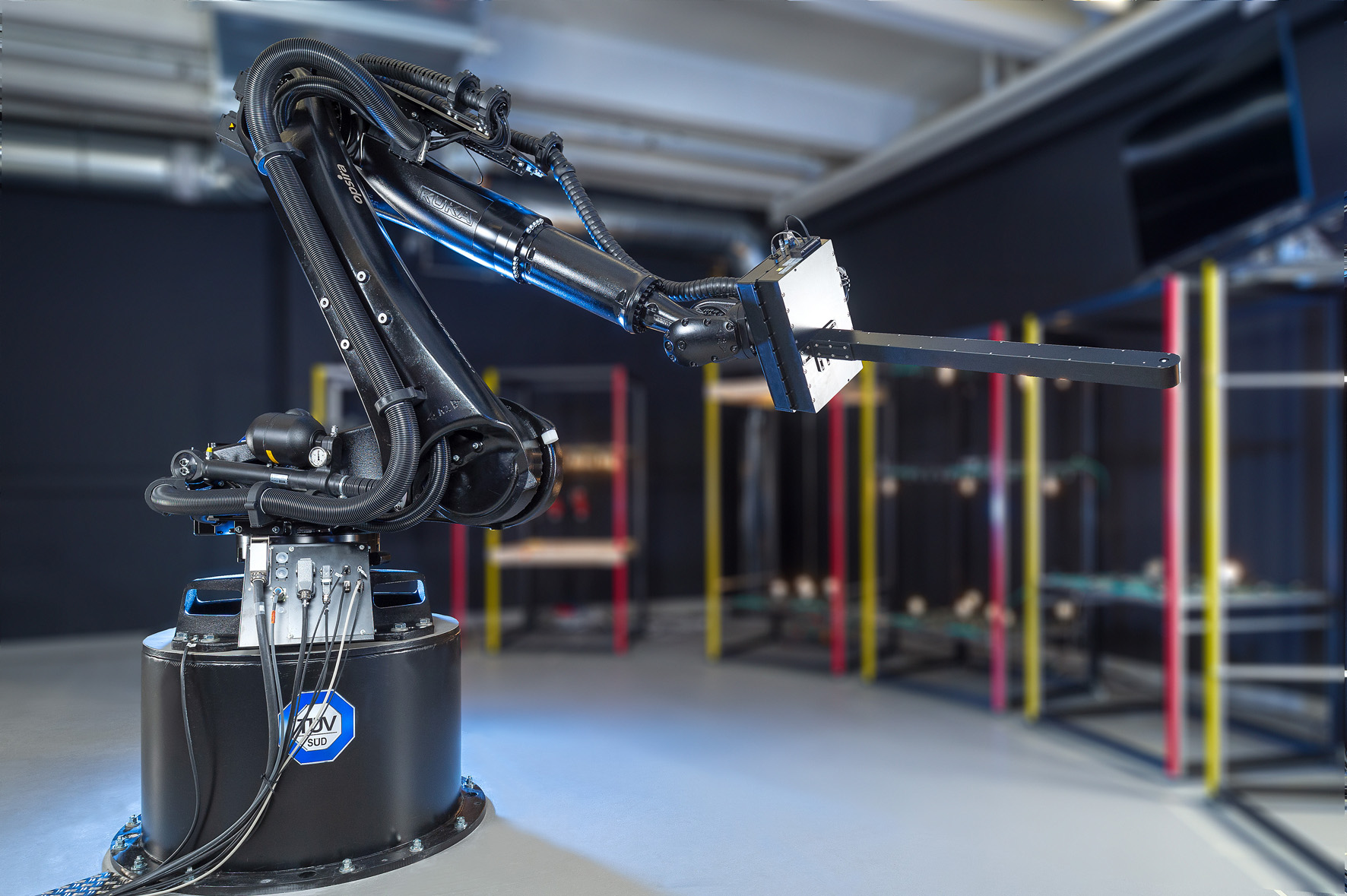
Die Handhabung biegeschlaffer Objekte mit Industrierobotern erfordert eine flexible Reaktionsfähigkeit auf Deformationen. Viele solcher Handling-Aufgaben werden daher heute manuell durchgeführt. Eine Alternative zeigt ein Ansatz umgesetzt als Demonstrator, der durch Kombination von Physiksimulation des biegeschlaffen Objekts und Feedback aus einer Stereokamera eine simulationsbasierte Positionierung ermöglicht.
Bild: Universität Stuttgart, ISW
Bild: Universität Stuttgart, ISW

Roboterdemonstrator kombiniert Simulation und Bildverarbeitung
mehr lesen