Greifer zur Handhabung von Energiekomponenten
Schmalz zeigt auf der Fachmesse für Batterien und Energiespeichersysteme EES Europe im Themenbereich Brennstoffzellen/Wasserstoff einen Roboter, der für einen wichtigen Prozess bei der Montage von Brennstoffzellen zum Einsatz kommt: das Stapeln der Membran-Elektroden-Einheit und der Bipolar-Platten. Dabei richtet der Greifer die Platten präzise zueinander aus, ohne deren Oberflächen zu beschädigen.
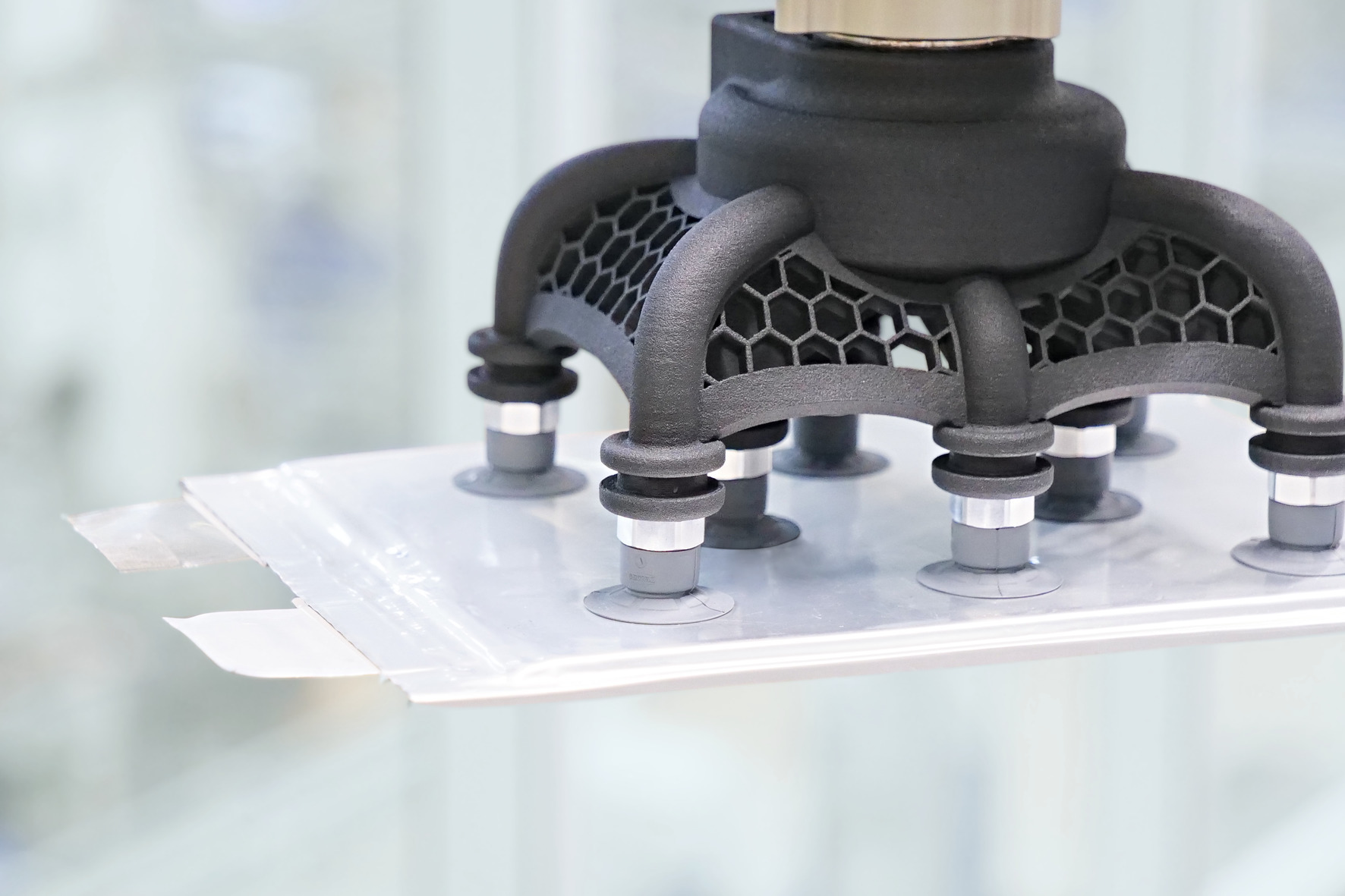
Bild: J. Schmalz GmbH
Schmalz zeigt außerdem Greifer für die automatisierte Fertigung von Pouch-Zellen und deren Montage zu Batteriemodulen, wie den individuell konfigurierbaren Leichtbaugreifer SLG. Auf der parallel stattfindenden Messe Intersolar zeigt Schmalz sein Produktprogramm für die Solarbranche. Dazu zählen unter anderem spezielle Wafer-Greifer, die Zykluszeiten von unter 1s mit einer präzisen Positionierung verbinden. Die Kontaktflächen aus dem abdruckfreien Material Peek verhindern zuverlässig Texturschäden und Kontamination der Wafer.











