Kompakte Roboterverpackungsanlage
Transnova-Ruf zeigt auf der diesjährigen Fachpack eine kompakte Roboterverpackungsanlage mit einer Fläche von 3,5×1,8m. Bei den zu verarbeitenden Produkten handelt es sich um Blister für Wurst- oder Käsewaren in runder und ovaler Form. Ein Kamerasystem detektiert in der Robot-Flexline-Zelle die Achsausrichtung, das Etikett und den Foliendruck. Ein Vierachs-Deltapicker richtet die Blister displaygemäß aus und setzt diese übereinander in ein Display-Tray. N.i.O.-Produkte verlassen die Anlage in einem KLT.
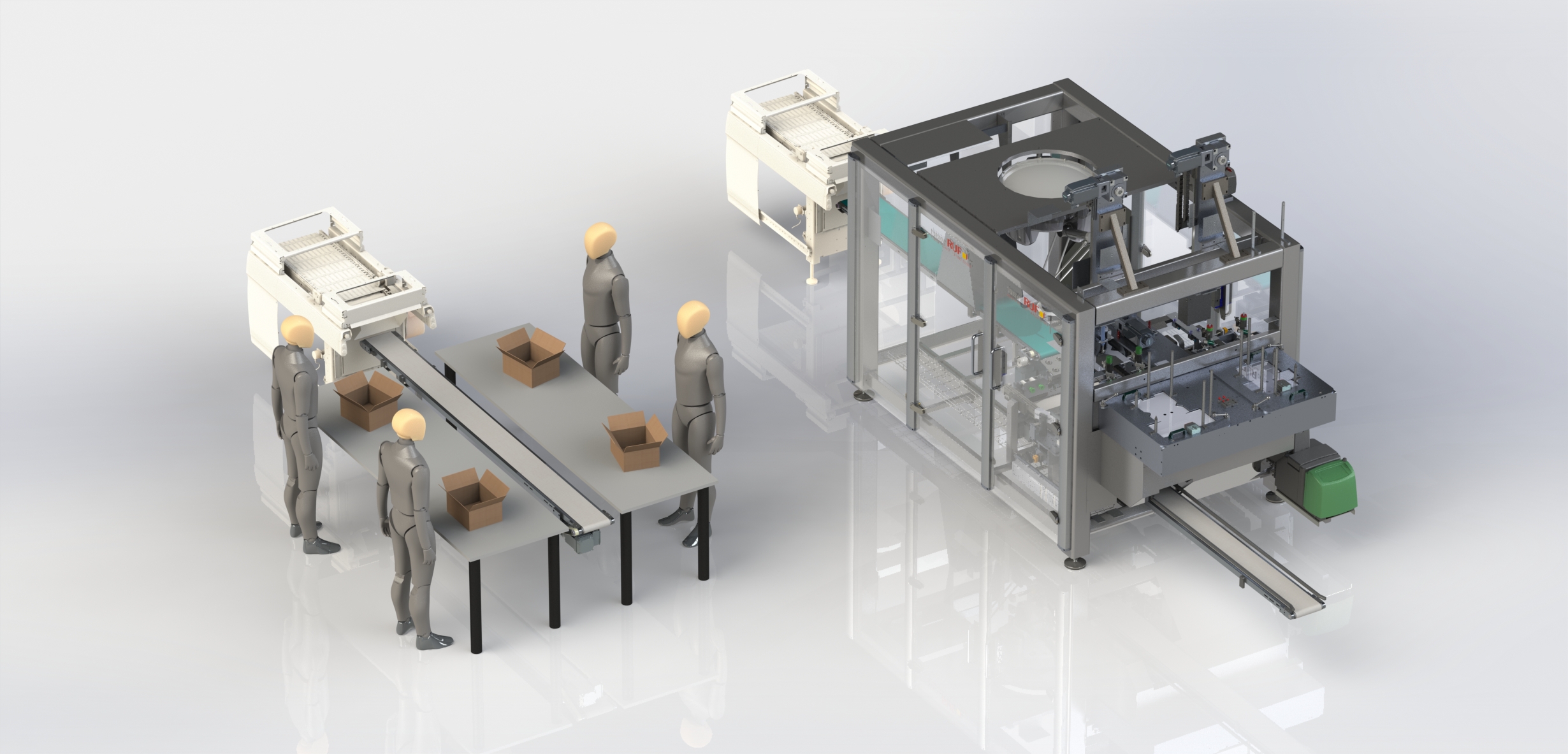
Bild: Transnova-Ruf GmbH
Nach der vollständigen Anzahl an Blistern im Tray wird das Tray 90° aufgerichtet und der Deckelstation zugeführt. Da die Blister straußförmig im Tray stecken, werden diese über einen Vierseiten-Deckelwerkzeug eingefangen und der Deckel in sich verklebt. Ein Sechachsroboter übernimmt mit einem Vakuumwerkzeug Kartons und Zwischenlagen. Die Leerpaletten werden auf einer Ebene von +85mm aufgegeben und über eine motorische Hubeinheit auf +600mm gehoben. Auf dieser Ebene wir auch palettiert und anschließend die volle Palette aus der Anlage gefördert.











