Mobiler Doppelarmroboter von Epson
Der Doppelarmroboter WorkSense W-01 von Epson soll Aufgaben ausführen können, die zuvor als nicht automatisierbar galten. Im Gegensatz zu fest installierten Robotern ist er sehr flexibel einsetzbar.
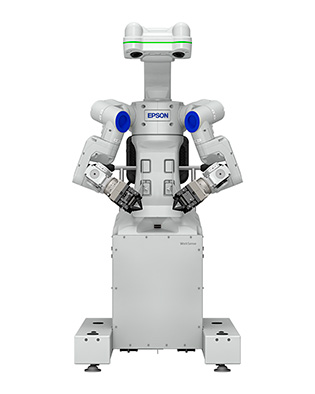
Bild: Epson Deutschland GmbH
Er lässt sich einfach von einem Ort zum anderen fahren. Er verfügt über zwei siebenachsige Arme und eine weitere Achse in der Taille. Jeder Arm besitzt eine Nutzlast von 3kg, mit beiden Armen gleichzeitig kann der Roboter eine Nutzlast von 6kg tragen. An Kopf und Handgelenk befinden sich eingebaute Kameras, externe Kameras sind als Option erhältlich. Der kompakte Roboter mit den Maßen 600x780x1464mm wiegt 150kg. Er eignet sich für den Einsatz in der Elektronikherstellung, Automobil- und Automobilzuliefererindustrie, Medizintechnik sowie Pharmaindustrie.











