Open-Source-Referenzdesign für die Entwicklung von Endeffektoren
Trinamic Motion Control hat ein vollständig integriertes Open-Source-Referenzdesign vorgestellt, das die Entwicklung von industriellen Roboterendeffektoren vereinfachen soll. Das Referenzdesign TMCM-1617-Grip-Ref vereint eine hardwarebasierte feldorientierte Steuerung (FOC) und drei Kommunikationsschnittstellen, um die Baugröße elektronischer Robotergreifer auf ein Drittel zu reduzieren und gleichzeitig die Entwicklungszeit auf die Hälfte zu verkürzen.
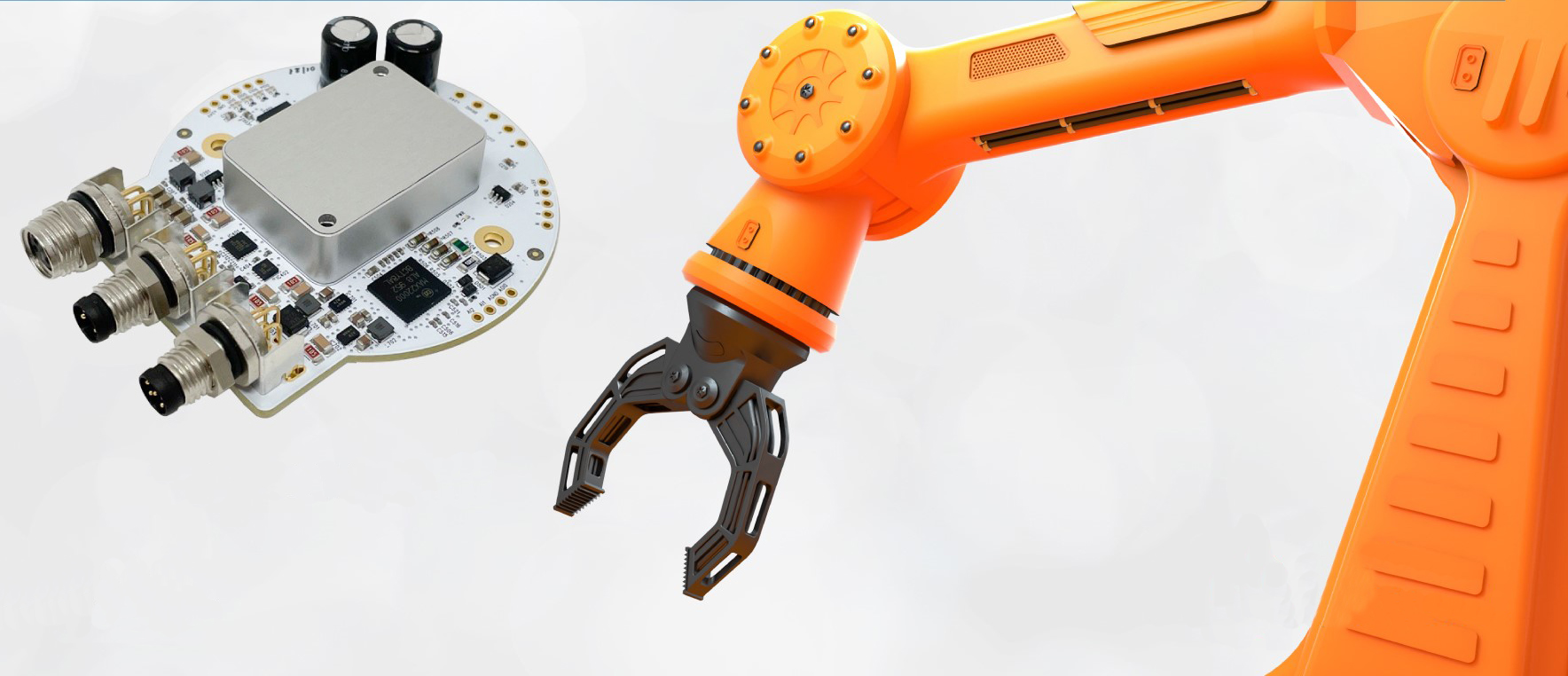
Bild: Trinamic Motion Control GmbH & Co. KG
Das Referenzdesign enthält den konfigurierbaren Analog-I/O MAX22000 von Maxim Integrated und den vierkanaligen Digital-I/O MAX14906 zur Anpassung der verschiedenen Modi des einachsigen Servo-Treibers Trinamic TMCM 1617. Das Referenzdesign ist so konzipiert, dass es in den Standardformfaktor für End of Arm Tools passt. Es unterstützt die industrielle Ethercat-, IO-Link- oder RS-485-Kommunikation, bietet softwareprogrammierbare analoge und digitale I/Os und kann mit der integrierten Entwicklungsumgebung Trinamic Motion Control Language konfiguriert werden.











