Sechsachser für den mittleren Traglastbereich
Stäubli hat innerhalb der TX2-Baureihe drei neue Sechsachser für den mittleren Traglastbereich entwickelt. Die Modelle TX2-140, TX2-160 und TX2-160L eignen sich mit ihrer steifen Struktur und dem Hygienedesign für Umgebungsbedingungen von rau bis steril. Das Modell TX2-160 kann 1.710mm weit greifen. Die Ausführung mit langem Arm, der TX2-160L, bis zu 2010mm weit. Beim TX2-140 liegt die Reichweite bei 1.510mm. Die Traglast beträgt beim TX2-140/160 jeweils 40kg, bei der Langarmversion reduziert sich dieser Wert auf 25kg. Damit schließt das Unternehmen die Lücke zwischen dem kompakten TX2-90 und dem großen TX2-200.
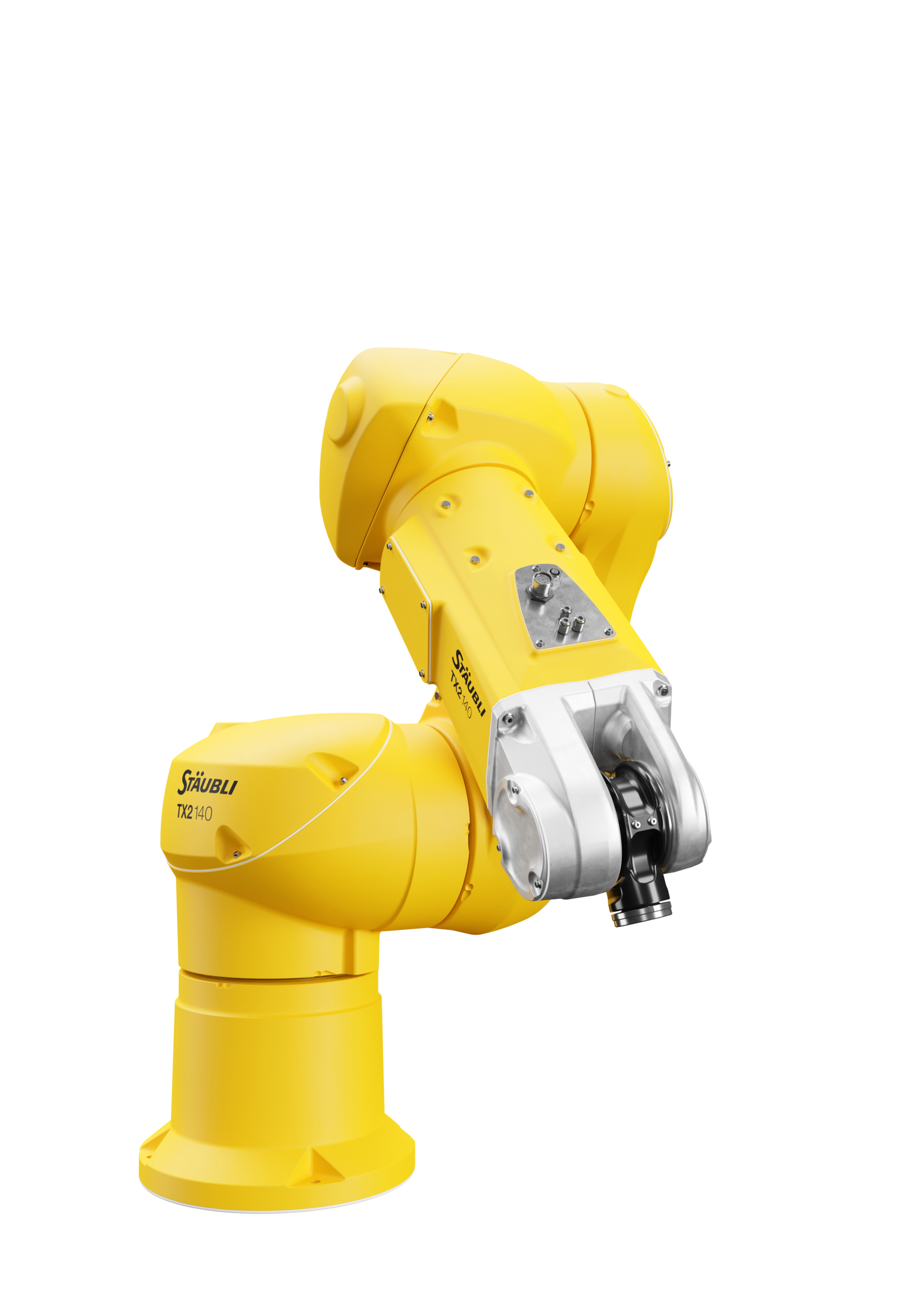
Bild: Stäubli Tec Systems GmbH
Die Wiederholgenauigkeit ist bei allen drei Maschinen mit ±0,05mm angegeben. Die maximale Geschwindigkeit in Achse 5 der neuen Modelle beträgt 1.500°/s. Sie verfügen über innenliegende Medien- und Versorgungsleitungen ohne Störkonturen sowie über ein komplett abgedichtetes Gehäuse in Schutzart IP65 (optional mit Überdruckeinheit IP67).











