Vakuumheber mit integrierter, netzunabhängiger Pumpe
Der Vakuumheber Aero-Cube von Aero-Lift hebt mit einem Eigengewicht von 20kg bis zu 250kg. Sein Vakuum funktioniert auch bei Oberflächen mit Rillen, Aussparungen und rauen Oberflächen. Mögliche Einsatzorte finden sich in der Blechverarbeitung, beim Gehäuse- und Fensterbau, in Elektronik, Logistik und im Kabinen- und Behälterbau.
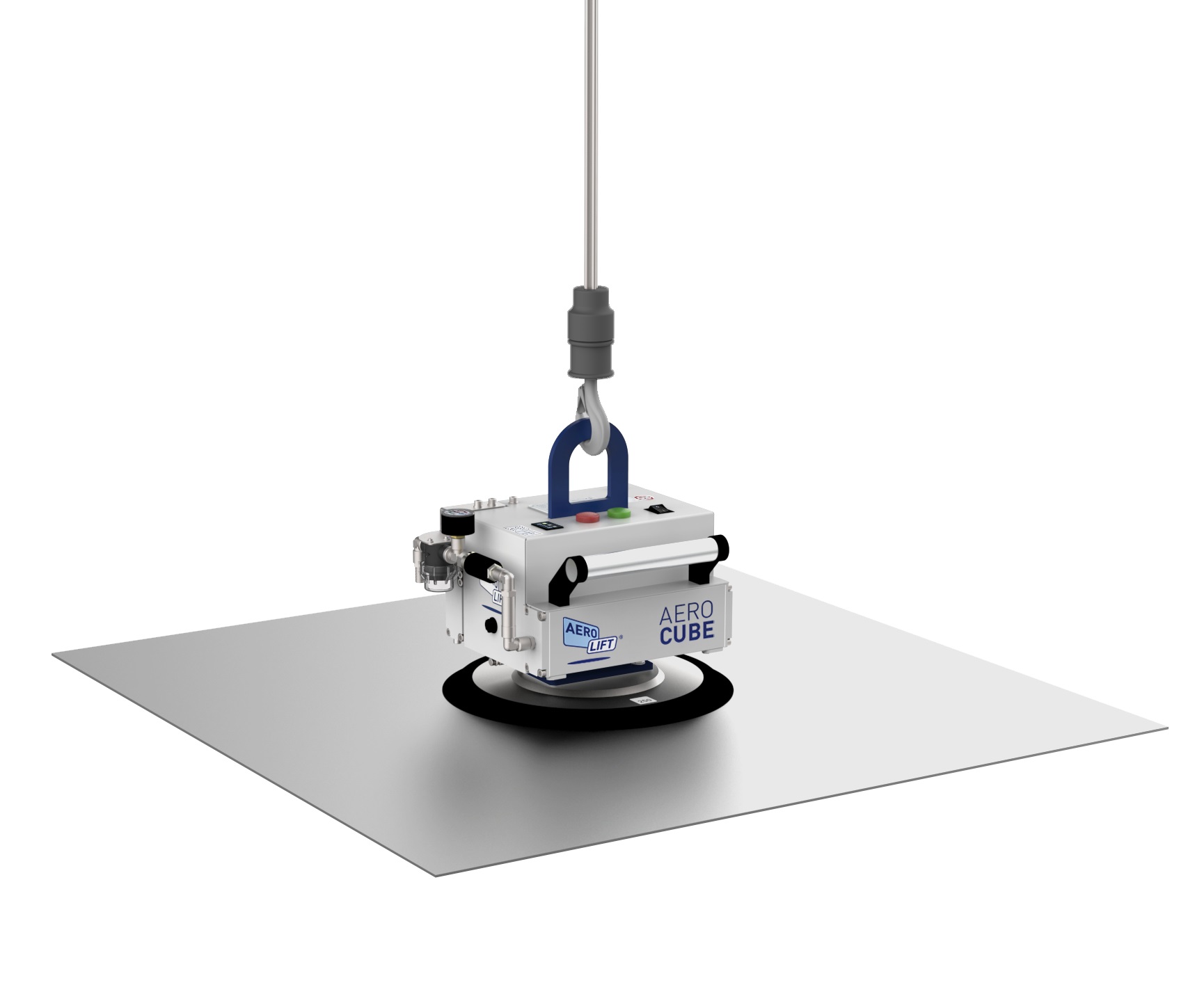
Bild: Aero-Lift Vakuumtechnik GmbH
Der Vakuumheber verfügt über Komponenten, wie austauschbare Saugplatten. Außerdem besitzt er eine integrierte, netzunabhängige Pumpe. Durch zwei integrierte Kranösen kann der Vakuumheber horizontale und vertikale Lasten bewegen.











