Marsroboter mit Greifarm und eigenem Nasslabor
Nicht zum Mars, sondern nach Kielce in Polen zur European Rover Challenge (ERC) ist das Frankfurt Robotics Science Team der Frankfurt University of Applied Sciences aufgebrochen. Mit im Gepäck: der selbstentwickelte Marsroboter Ares. Die ERC ist eine jährliche internationale Raumfahrt- und Robotikveranstaltung, die den Wettbewerb der Mars-Rover für Hochschulteams mit wissenschaftlichen und technologischen Vorführungen verbindet.
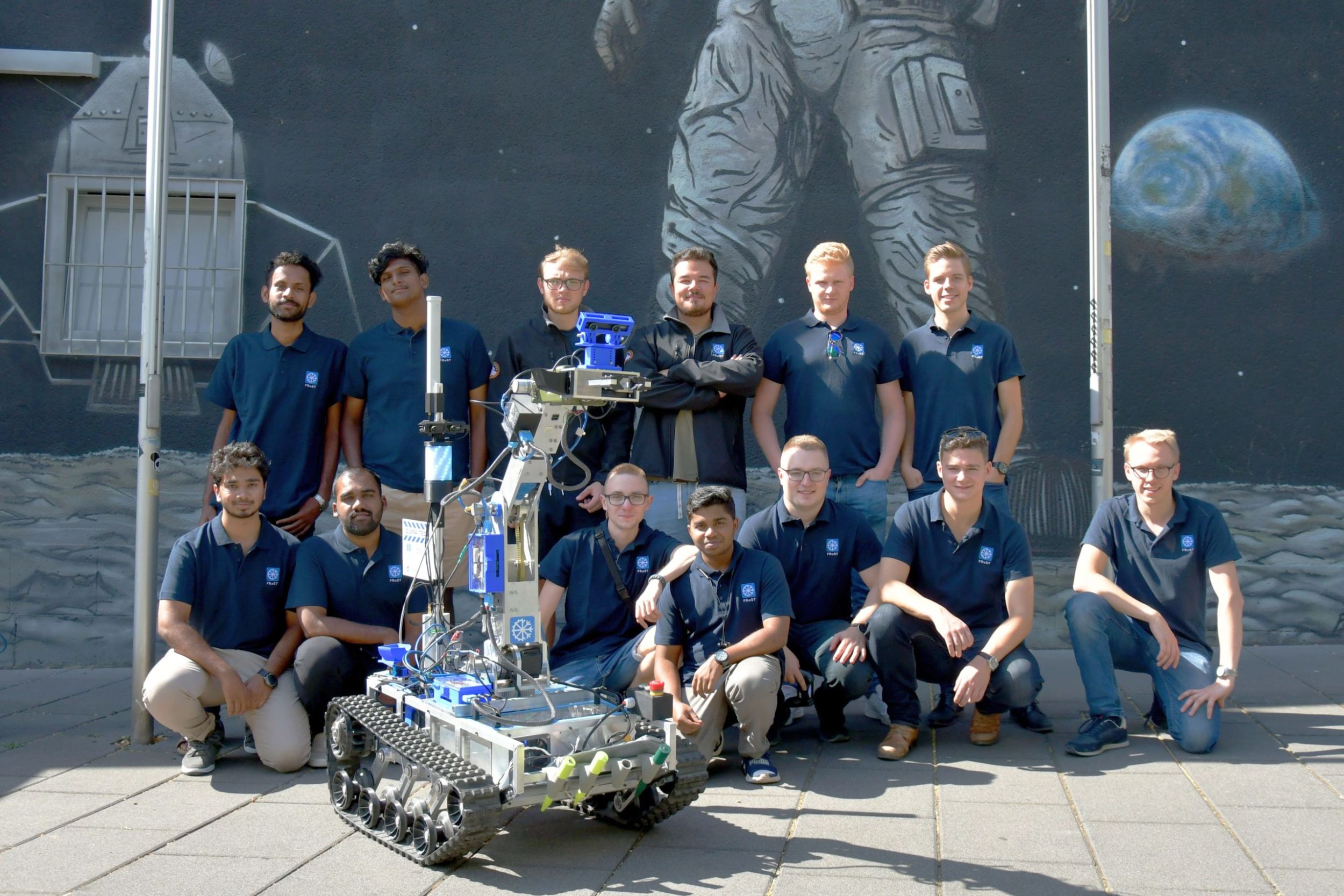
Bild: Frankfurt University of Applied Sciences
Ares ist ein halbautonomer Roboter, der über eine sogenannte Ground Station aus der Ferne gesteuert wird und verschiedene Aufgaben im Rahmen einer unbemannten Marsmission erfüllen kann. So verfügt er nicht nur über einen Greifarm, mit dem er z.B. Bodenproben entnehmen kann, sondern auch über ein kleines chemisches Nasslabor, das die Analyse dieser Proben an Bord möglich macht. Seine Energie erhält der Roboter über ein Solarpanel. Er ist mit einem Raupenfahrwerk ausgestattet. Über eingebaute Kameras kann der Roboter seine Position bestimmen.











