Robotergestütztes Inkjet-Drucken auf 3D-Bauteilen
Das Fraunhofer-Institut für Elektronische Nanosysteme ENAS hat ein robotergestütztes Inkjet-Druckverfahren für 3D-Bauteile vorgestellt. Dabei werden Funktionstinten mit elektrisch leitfähigen und dielektrischen Eigenschaften verwendet, um Leiterbahnen oder sogar komplexe Sensorsysteme auf beliebige 3D-Objekte zu drucken. Dafür werden die Digitaldrucksysteme auf Roboterarme montiert.
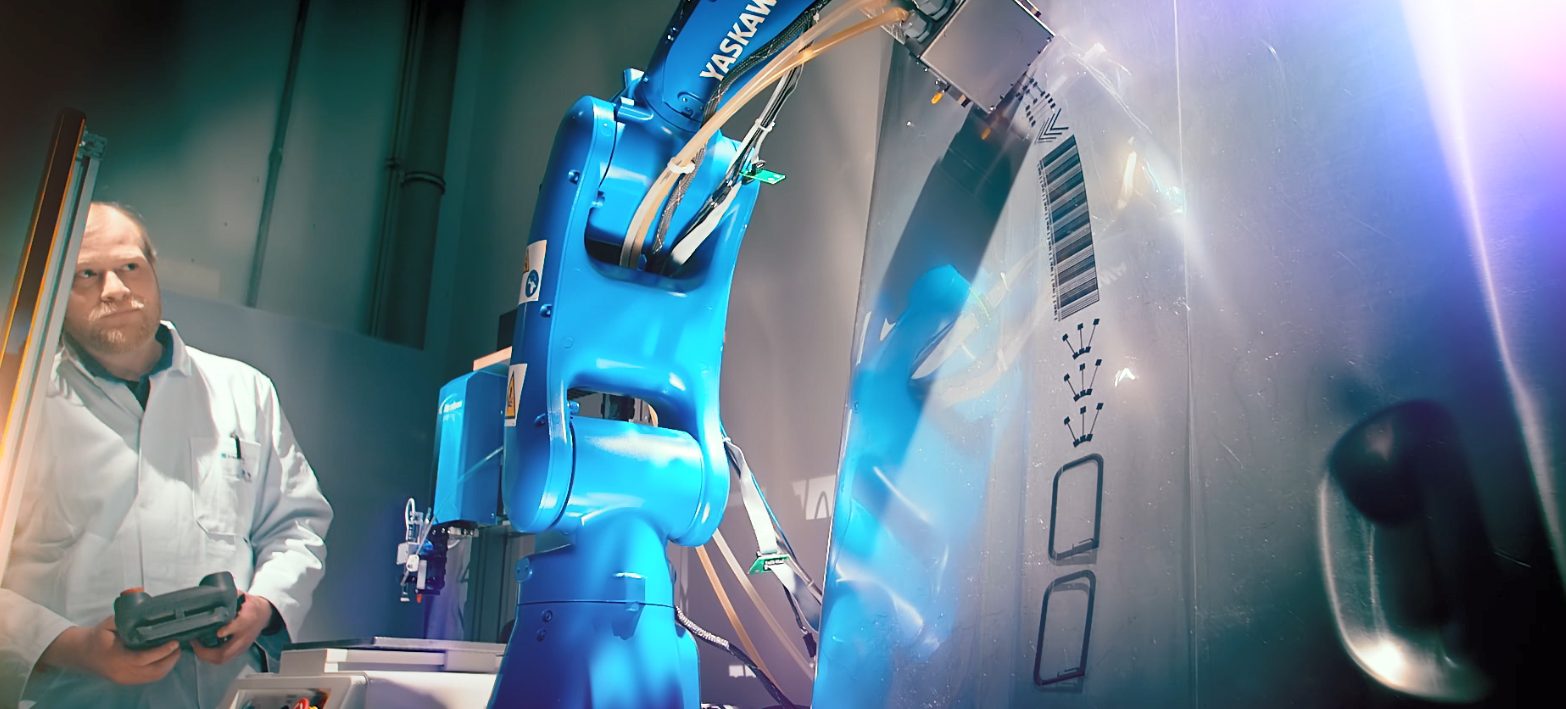
Bild: © Biermann & Jung
Das erlaubt eine Anwendung auf beliebig geformte und ausgeprägte Objekte. Das Fraunhofer ENAS nutzt dazu u.a. einen Sechsachsroboter und leistet umfangreiche Forschungsarbeiten, um verschiedene Herausforderungen des Funktionsdrucks auf 3D-Objekte wie die Haftfestigkeit von gedruckten Schichten und die Realisierung von homogenen elektrischen Leitern auf gekrümmten Oberflächen zu bewältigen.











