Kommissionierroboter in der Intralogistik
Der Logistikanbieter Meyer & Meyer setzt zwei Kommissionierroboter von Magazino für die Kartonabwicklung in seinen Hallen ein. Seit April 2018 unterstützen sie die Technik die Ein- und Auslagerung von Schuhkartons.
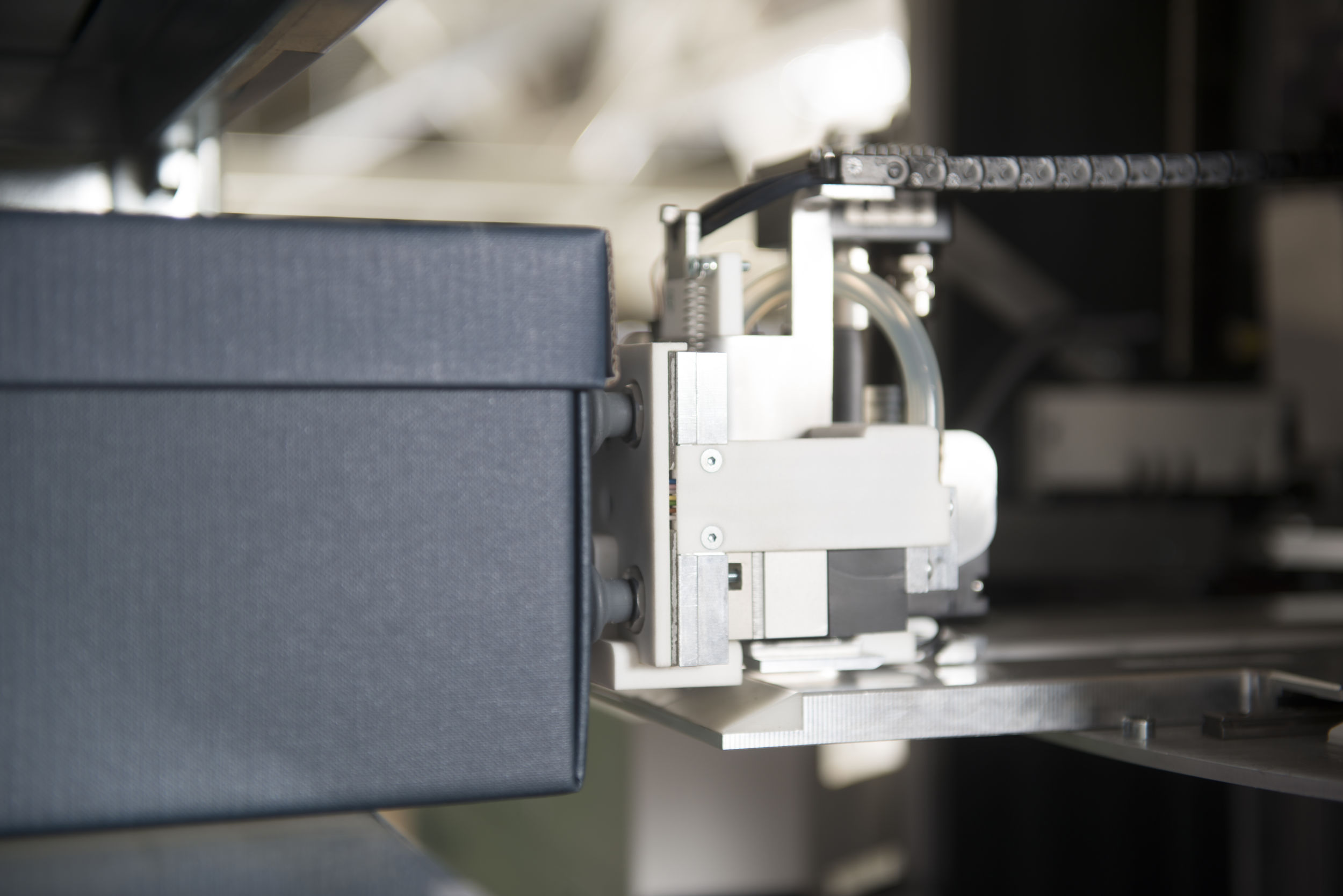
(Bild: Meyer & Meyer)
Technikpartner für das Projekt ist der Robotikhersteller Das Start-up Magazino . Das Unternehmen entwickelt und baut wahrnehmungsgesteuerte, mobile Roboter für die Intralogistik, die den stückgenauen Zugriff auf einzelne Objekte und damit ein automatisiertes Handling z.B. von Schuhkartons ermöglichen soll. Über Kameras, Sensoren und Laserscanner können die Roboter ihre Umgebung wahrnehmen, interpretieren und dadurch selbständig agieren und Entscheidungen fällen. Mit Hilfe einer 3D-Kamera wird die genaue Lage sowie die Dimensionen eines Schuhkartons erfasst – basierend darauf in Sekundenbruchteilen der Greifprozess geplant und anschließend ausgeführt. Ihre Arbeitsaufträge erhalten die Roboter über eine WLAN-Verbindung zum Warenwirtschaftssystem. Zusätzlich können sich die Roboter darüber vernetzen, Erfahrungen mit komplexen Situationen austauschen und somit voneinander lernen.











