Siemens-S7-Plugin für Simulationssoftware
Um Prozesse in der Anlagen- und Materialflussplanung berechenbar zu machen, bietet Dualis unter anderem die 3D-Simulationsplattform Visual Components an.
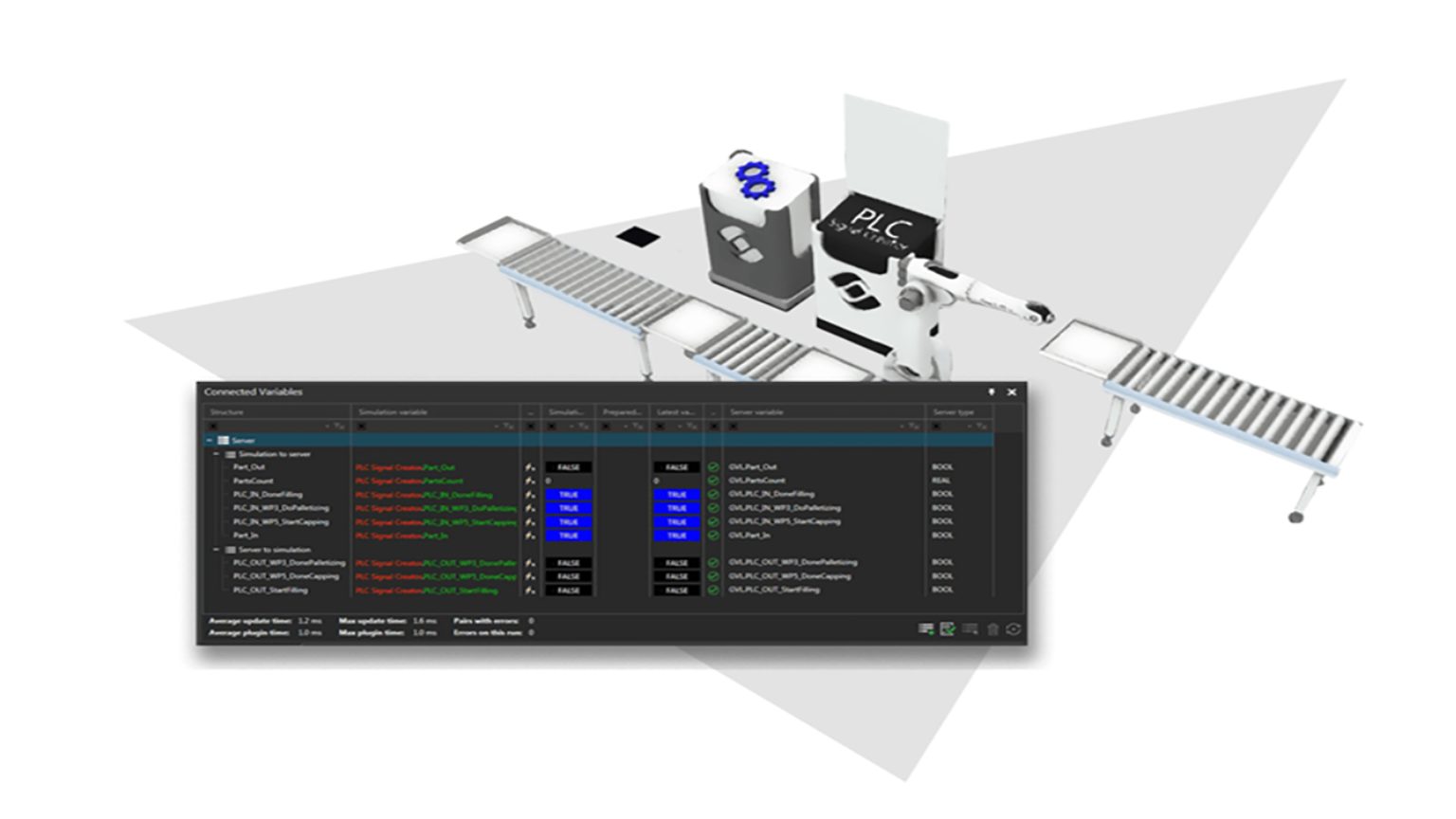
Bild: Dualis GmbH IT Solution
Waren dort bisher Plugins für OPC-UA und Beckhoff ADS verfügbar, ist mit dem neuen Plugin jetzt auch eine direkte Anbindung an Siemens-S7-Steuerungen möglich. Dabei werden sowohl physische Steuerungen, z.B. der S7-1500 Serie, als auch simulierte Steuerungen (PLC Sim/PLC Sim Advanced) unterstützt und unkompliziert via TCP/IP angebunden.











