Kurbelwellen in einer Aufspannung vollständig bearbeiten
Röhm präsentiert eine Kombination aus Wellenspannfutter, Lünette und Greiftechnik zum Bearbeiten und Transport von Kurbelwellen in unterschiedlichen Fertigungsstufen. Innerhalb weniger Minuten lässt sich das Wellenspannfutter von hochgenauer zentrischer Spannung auf ausgleichende Spannung zur Rohteilspannung umbauen.
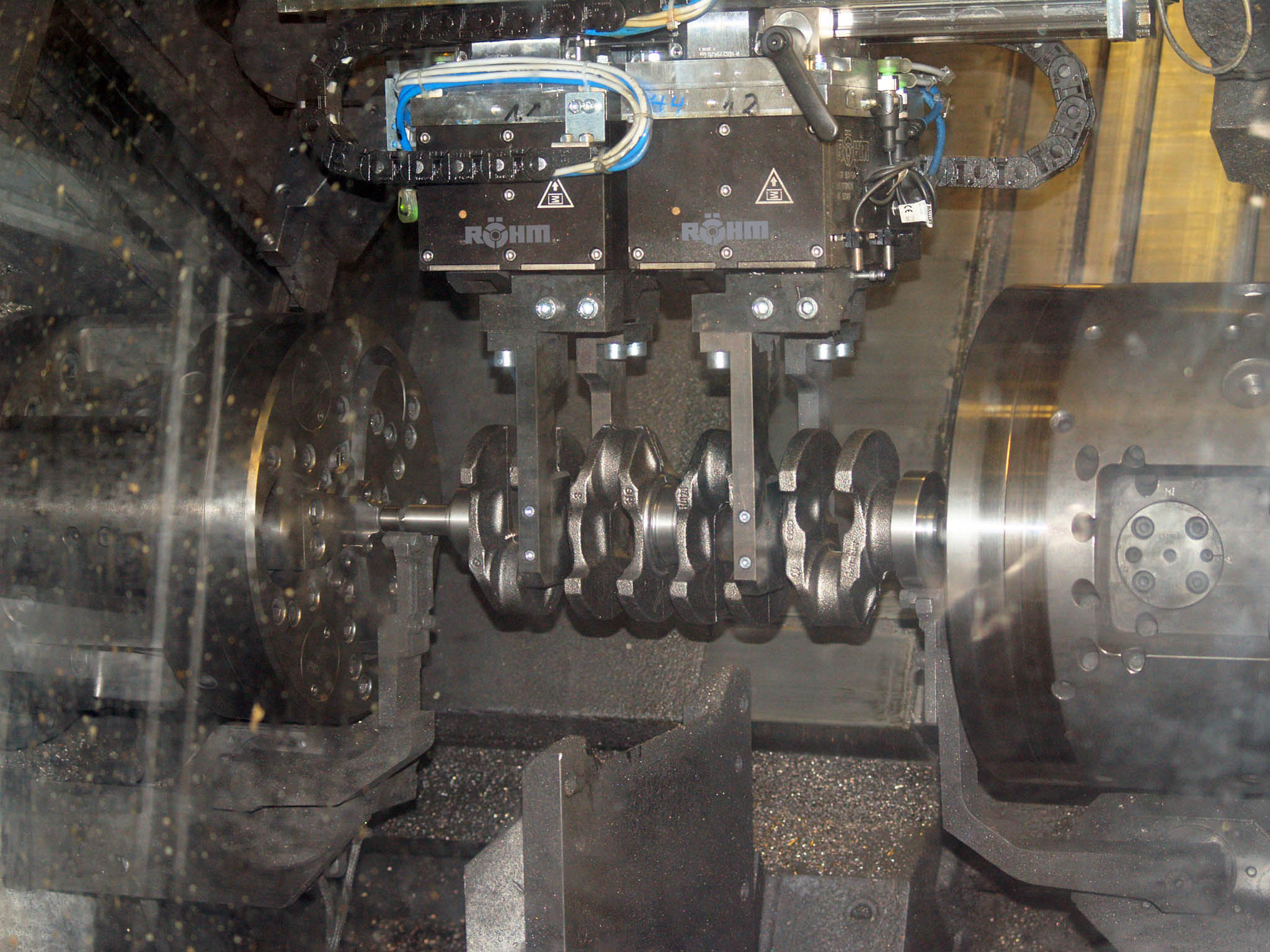
Bild: Röhm GmbH
Das erlaubt einen flexiblen Einsatz – je nach gewünschtem Bearbeitungsablauf. Ausgefahrene Spannarme ermöglichen hohe Bearbeitungskräfte. Sie sind in der Lage, ohne Umspannvorgang zurückzufahren, um an den Enden der Welle die Fertigbearbeitung durchzuführen. Dabei bewegt ein Stirnseitenmitnehmer das Werkstück. Der Transport erfolgt über Greifer von Maschine zu Maschine. Das System arbeitet als wichtiges Glied in der vollautomatisierten Herstellung von Kurbelwellen zuverlässig sowie nahezu wartungsfrei. Dabei packt es kurze Wellen für Dreizylindermotoren genauso sicher wie lange für Zwölfzylindermotoren. Zum Greifen der Wellen kommt es in den Hauptlagern, ohne dass die ausladenden Ausgleichgewichte den Greifvorgang behindern. Dafür sorgen lange Greifbacken, die sich sicher führen lassen.











