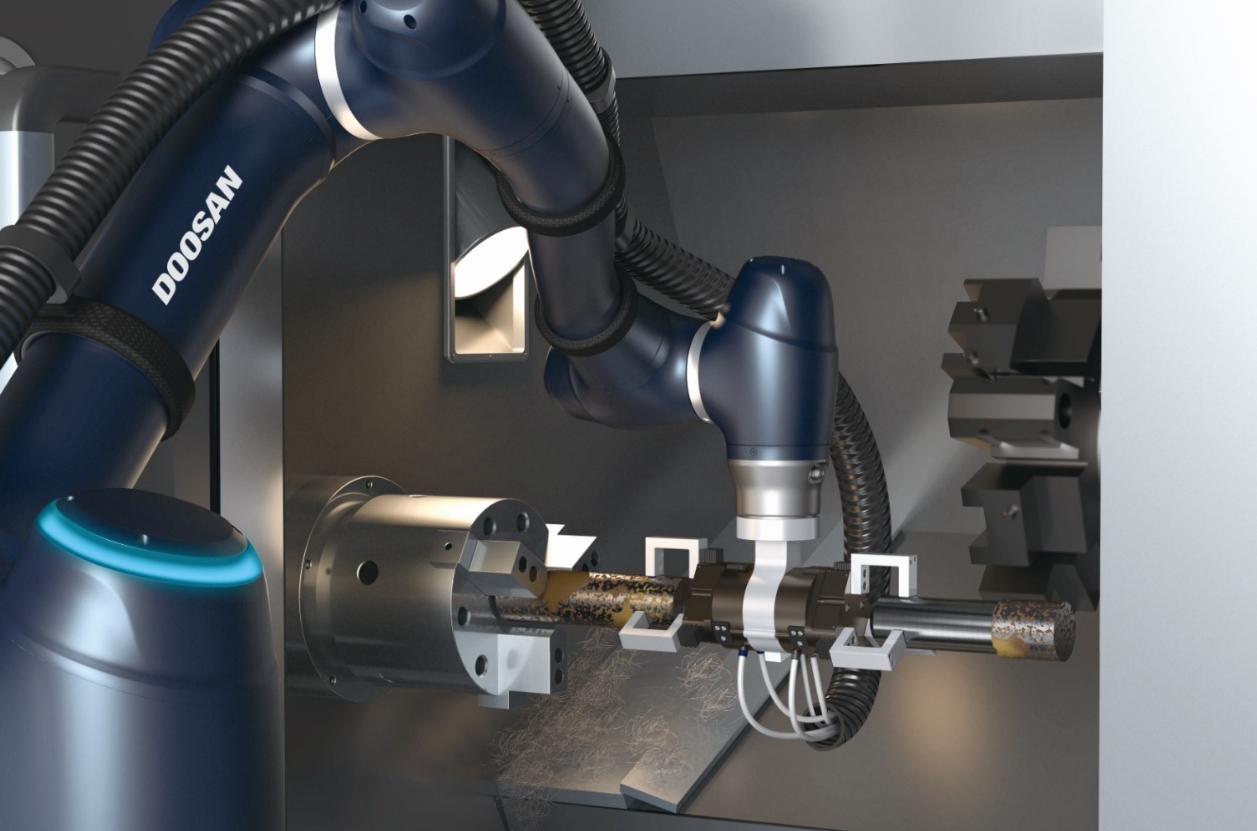
Die Steuerung von Robotersystemen wird bisher lokal mit proprietärer Software realisiert. Ein Grund dafür ist das fehlende Vertrauen in die Datensicherheit von Online-Diensten. Durch Smart Contracts könnte sich das ändern und künftig Robotersteuerungen auslagern lassen. Dazu werden die Algorithmen zur Bewegungsplanung per Blockchain ausgeführt – verschlüsselt übertragen und fälschungssicher dokumentiert. Erste Experimente zeigen die Machbarkeit einer solchen Architektur und zeigen Potenzial für robotergeführte Handhabungsaufgaben.
Bild: Fraunhofer-Institut IPK
Bild: Fraunhofer-Institut IPK

Sichere Robotersteuerung aus der Cloud
mehr lesen