Gedächtnis für mobile Roboter
Dynamische Karten
Das Auto der Zukunft fährt autonom, vermeidet Gefahren und sucht sich den freien Parkplatz wie von selbst: Was momentan noch visionär klingt, haben Wissenschaftlerinnen und Wissenschaftler längst als Ziel definiert. Am Institut für Kartographie und Geoinformatik werden dynamische Karten entwickelt, um die Realität zu erfassen und Fahrzeugen ein intelligentes Verhalten zu ermöglichen.
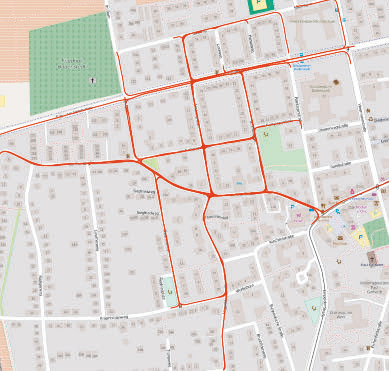
Testgebiet in Badstedt. Oben die vom Fahrzeug zurückgelegten Trajektorien, unten die dabei entstandene Punktewolke mit über 1Mrd. Punkten. (Bild: Leibniz Universität Hannover)

Bild: Leibniz Universität Hannover
Autonome Transportsysteme in der Logistik, Landwirtschaftsroboter, selbstfahrende Automobile, fahrende und fliegende (Drohnen-)Liefersysteme sowie autonome Staubsauger und Rasenmäher zeugen von einer Entwicklung hin zu einer Welt, in der sich Roboter frei bewegen, ihren Aufträgen nachgehen und dabei mit Menschen und Objekten ihrer Umwelt interagieren. Mobile Roboter treiben diesen Wandel an, denn Mobilität benötigt Sensoren, Aktoren und Intelligenz. Da mobile Roboter in ihre Umgebung eingebettet sind, wird die Planung eines intelligenten Verhaltens erleichtert, wenn ein räumliches Modell der Umgebung vorliegt. Herkömmliche Karten sind solche Umgebungsmodelle. Beschränkt auf eine ausgewählte Thematik dokumentieren sie den Ist-Zustand der Welt. Sie werden mittels Vermessung erfasst, aufbereitet, veröffentlicht und schließlich benutzt. Aufgrund der aufwendigen Erstellung ist ihre Aktualisierung leider nur in großen Zeitabständen zu leisten, weshalb sie meist veraltet sind. Ziel aktueller Entwicklungen sind deshalb dynamische Karten, die ein zeitnahes Abbild der Realität liefern. Das ist nur möglich, wenn die Erfassung viel häufiger als bisher erfolgt. Hierfür muss sie wesentlich preisgünstiger werden, was sich dadurch erreichen lässt, dass die Nutzer der Karte zugleich ihre Erfasser sind. Die individuelle Selbsterfassung dynamischer Karten reicht jedoch nicht aus, denn sie würde bedeuten, dass Regionen, die noch nie besucht wurden, nicht kartiert sind. Der zweite wesentliche Aspekt ist daher die Kollaboration. Alle Roboter tauschen dabei ihr Wissen über die Welt aus, sodass ein kollektives Gedächtnis entsteht, auch als Crowd-Sensing bezeichnet. In der Forschung gelang kürzlich die Einwerbung des Graduiertenkollegs i.c.sens – Integrität und Kollaboration in dynamischen Sensornetzwerken. Nachfolgend sind drei Beispiele aktueller Forschungsarbeiten skizziert.
Autonom fahren aufgrund hochgenauer Karten
Die heute verwendeten Karten für Fahrzeugnavigationssysteme sind für zukünftige, automatisierte und autonome Fahrzeuge nicht ausreichend. Für diese wird eine hochaufgelöste, fahrspurgenaue Karte benötigt, die die genaue Planung der Fahrstrecke (Solltrajektorie) erlaubt, sowie eine Merkmalskarte, die Objekte enthält, die eine hochgenaue und zuverlässige Eigenlokalisierung ermöglichen. Um diese Karten aktuell zu halten, sind Daten der Nutzer erforderlich. Hierzu verfügen zukünftige Fahrzeuge über Bild-, Radar-, Laserscanning- und Ultraschallsensoren, deren Messungen an zentrale Server geschickt werden. Dort werden sämtliche Messwerte unter Berücksichtigung ihrer Fehler zu einer Gesamtkarte fusioniert. Ein Experiment hierzu wurde in Hannover Badenstedt durchgeführt. Über einen längeren Zeitraum hinweg wurden Teile des Gebiets mit einem Mobile-Mapping-Fahrzeug befahren, das über Laserscanning-Sensoren verfügt. Dadurch sind 150 einzelne Scanstreifen entstanden, die insgesamt mehr als eine Milliarde 3D-Punkte enthalten. Während die Einzelmessungen relativ zum Fahrzeug sehr genau sind (etwa 1cm), ist die Position des Fahrzeugs selbst relativ ungenau (einige dm). Die Fusion hat die Aufgabe, alle individuellen Scanstreifen zu einer konsistenten, globalen Karte zu verrechnen. Insgesamt wurden etwa eine Milliarde Beobachtungen verwendet, um 278.000 Unbekannte zu berechnen. Eine Besonderheit dabei ist die Organisation des Lösungsalgorithmus, der als MapReduce (ein Big-Data-Standardver-fahren) ausgeführt ist. Dadurch skaliert der Algorithmus linear in der Größe der Szene und lässt sich auf beliebig viele Rechner verteilen. Auch wenn die Daten normaler Fahrzeuge nicht die Qualität der Mobile-Mapping-Daten aufweisen, führt dieses Experiment doch zu zwei wesentlichen Erkenntnissen. Erstens, dass die Ausgleichung beliebig großer Gebiete möglich ist, und zweitens, dass die schiere Redundanz der Messungen es erlaubt, Karten in einer nie da gewesenen Dichte und Genauigkeit zu erstellen.
Gefahren vermeiden mit kollektiver Erfahrung
Neben der Lokalisierung und Routenplanung fallen dem Fahrzeug während des autonomen Fahrens noch weitere Aufgaben zu, die für einen normalen Fahrer selbstverständlich sind. Als Mensch passen wir unser Fahrverhalten der Umgebung an. So fahren wir in Straßen, in denen mit einem hohen Fußgänger- und Fahrradfahreraufkommen zu rechnen ist, weitaus vorsichtiger als auf großen Umgehungsstraßen. Wir können auch die Gefahr einschätzen, dass Fußgänger unsere Fahrbahn kreuzen, um die Straßenseite zu wechseln. All diese für uns intuitiven Gefahreneinschätzungen beruhen auf Erfahrungswerten. Ein Ziel der Forschung ist es, solche Erfahrungswerte autonomen Fahrzeugen in Form von Gefahrenkarten zur Verfügung zu stellen. Die Detektion von Fußgängern und Fahrradfahrern ist ein wichtiger Bestandteil autonom fahrender Fahrzeuge. Verschiedene Sensoren, wie Kameras oder Laserscanner, erfassen die Umgebung, detektieren sich bewegende Objekte und bestimmen deren Bewegungsrichtung. Bisher wurden die so gewonnenen Daten nur direkt vom jeweiligen Fahrzeug verwendet, um Unfälle zu verhindern. Jedoch lässt sich auch hier der Crowd-Sensing-Ansatz verwenden, um kollektiv eine Gefahrenkarte zu erstellen, die als Vorinformation allen Teilnehmern zur Verfügung steht. Im konkreten Fall wurden Daten mehrerer Messfahrten des Mobile-Mapping-Systems verwendet. Die Unterscheidung der Fußgänger und Fahrradfahrer von anderen Objekten erfolgt durch ein Klassifikationsverfahren, das zuvor mit Beispielen trainiert wurde. Alle detektierten Fußgänger und Fahrradfahrer werden anschließend in einer Karte aggregiert und jeweils entsprechend ihrer Distanz zur Straße gewichtet – je näher, desto gefährlicher. Treten in bestimmten Gebieten viele Fußgänger und Fahrradfahrer auf, so ist an dieser Stelle der Wert der Gefahrenkarte besonders hoch und autonome Fahrzeuge können an diesen Orten ihr Fahrverhalten entsprechend anpassen.
 werden in eine Gefahrenkarte eingetragen (rechtes , Hintergrundkarte: Google Earth). Die roten Bereiche in der Karte zeigen Orte mit einem besonders hohen Gefahrenpotenzial an. (Bilder: Leibniz Universit?t Hannover)")
Detektierte Fußgänger und Fahrradfahrer (oberes Bild, rot) werden in eine Gefahrenkarte eingetragen (unteres Bild, Hintergrundkarte: Google Earth). Die roten Bereiche in der Karte zeigen Orte mit einem besonders hohen Gefahrenpotenzial an. (Bild: Leibniz Universität Hannover)

Bild: Leibniz Universität Hannover
Schneller zum freien Parkplatz
Auch bei der Parkplatzsuche kann Crowd-Sensing hilfreich sein. In vielen Städten herrscht regelmäßig Parkplatznot. Autofahrer finden keinen Parkplatz an ihrem Ziel und gehen auf die Suche nach einer Parklücke in der Umgebung. Ein Ansatz zur Reduktion dieses Parkplatzsuchverkehrs sind dynamische Parkplatzkarten. Solche Karten beinhalten einerseits Informationen, an welchen Stellen es im Straßennetz erlaubt ist zu parken und andererseits eine Schätzung der Verfügbarkeit von freien Parkplätzen. Während sich die Parkerlaubnis nur selten (z.B. durch Bauarbeiten) ändert und damit eine geringe Dynamik aufweist, ist die aktuelle Parkplatzverfügbarkeit eine hochdynamische Information mit Änderungen im Minutentakt. Zukünftig könnten diese dynamischen Parkplatzkarten in Navigationssysteme integriert werden. Aktuelle Änderungen der Karte werden dabei über das Mobilfunknetz übertragen. Ähnlich wie bei Informationen zur aktuellen Verkehrslage kann das Navigationssystem dem Fahrer dann die Auslastung von Parkstreifen anzeigen und eine Route vorschlagen, auf der eine hohe Chance auf einen freien Parkplatz besteht. Für die Erfassung der aktuellen Parkplatzsituation existieren verschiedene Lösungen: statische Sensoren, Smartphoneanwendungen und – als derzeit vielversprechendste Lösung – die Fahrzeugsensorik. Bei Letzterer erfassen moderne, handelsübliche Fahrzeuge die Parkplatzbelegung am Straßenrand während der Fahrt mittels Ultraschallsensoren oder Kameras. Die Positionen der detektierten Parklücken oder parkenden Autos werden an einen Backendserver übertragen, dort aggregiert und anschließend an andere Fahrzeuge weitergegeben. Die Forschung beschäftigt sich nun damit, wie sich dynamische Parkplatzkarten aus den so gewonnenen Sensordaten mithilfe von Verfahren des maschinellen Lernens generieren lassen. Ein Schwerpunkt ist dabei die Vorhersage der Parkplatzverfügbarkeit in naher Zukunft anhand von aktuellen und historischen Messwerten sowie weiteren Einflussfaktoren wie der Tageszeit oder benachbarten Gebäuden.











