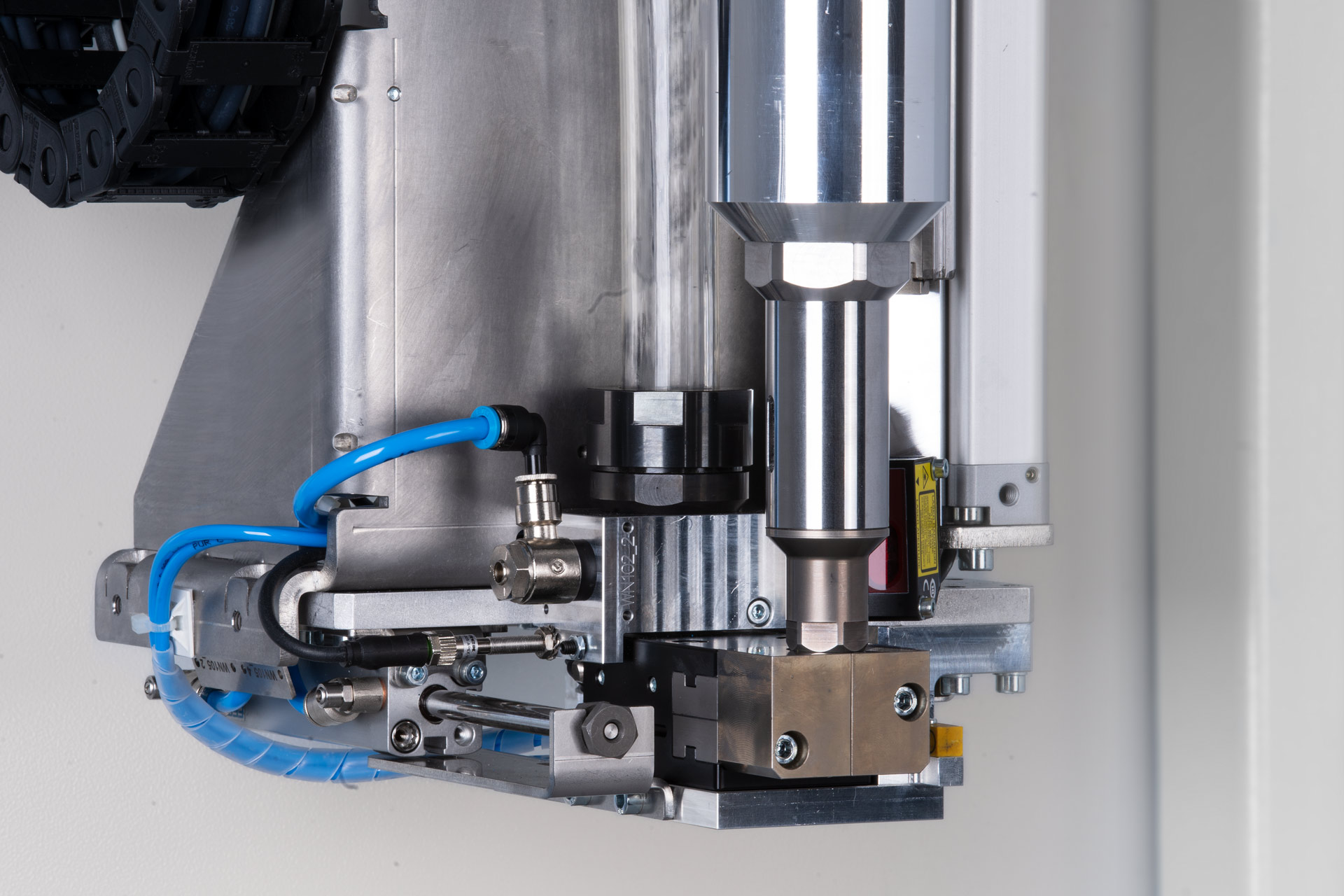
Liebherr hat auf der Automatica Vision-Systeme für das Werkstückhandling gezeigt. Je nach Anforderung arbeitet der Hersteller mit einer Auswahl von drei unterschiedlichen Varianten.
Bild: Liebherr-Verzahntechnik GmbH
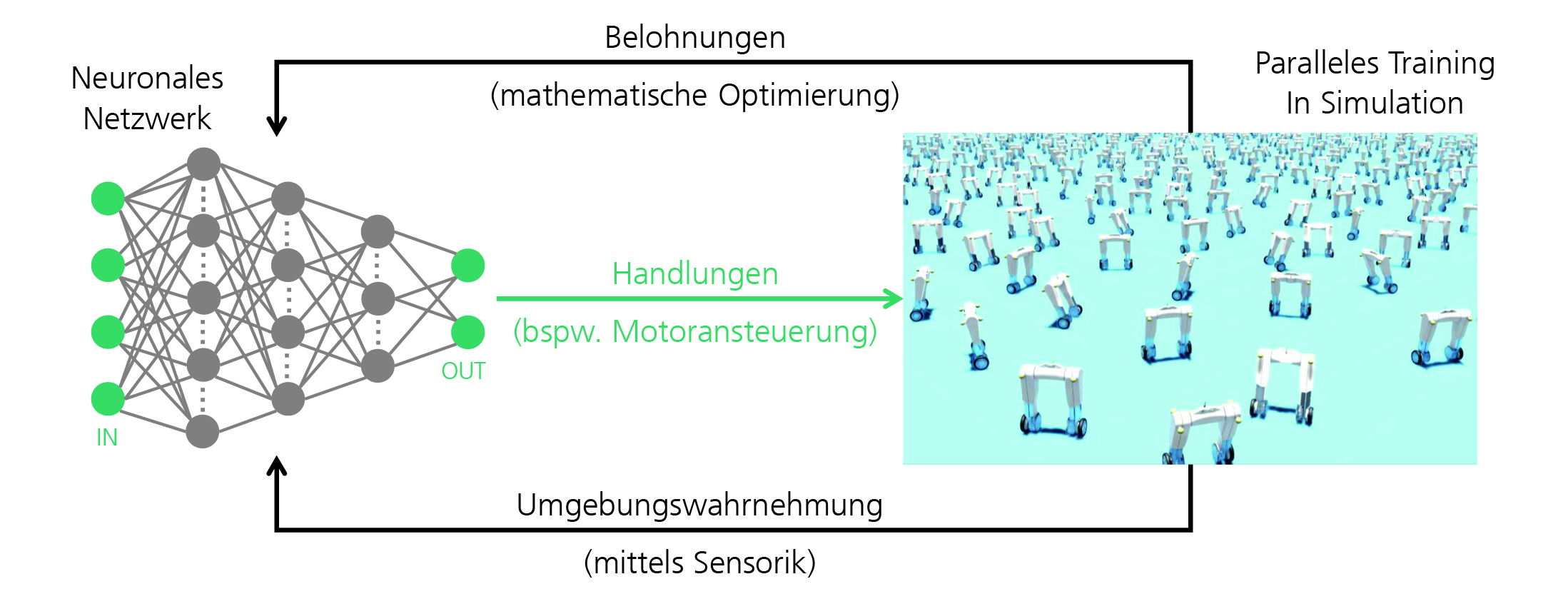
Bild: Liebherr-Verzahntechnik GmbH

Vision-Systeme für das Bin Picking
mehr lesen