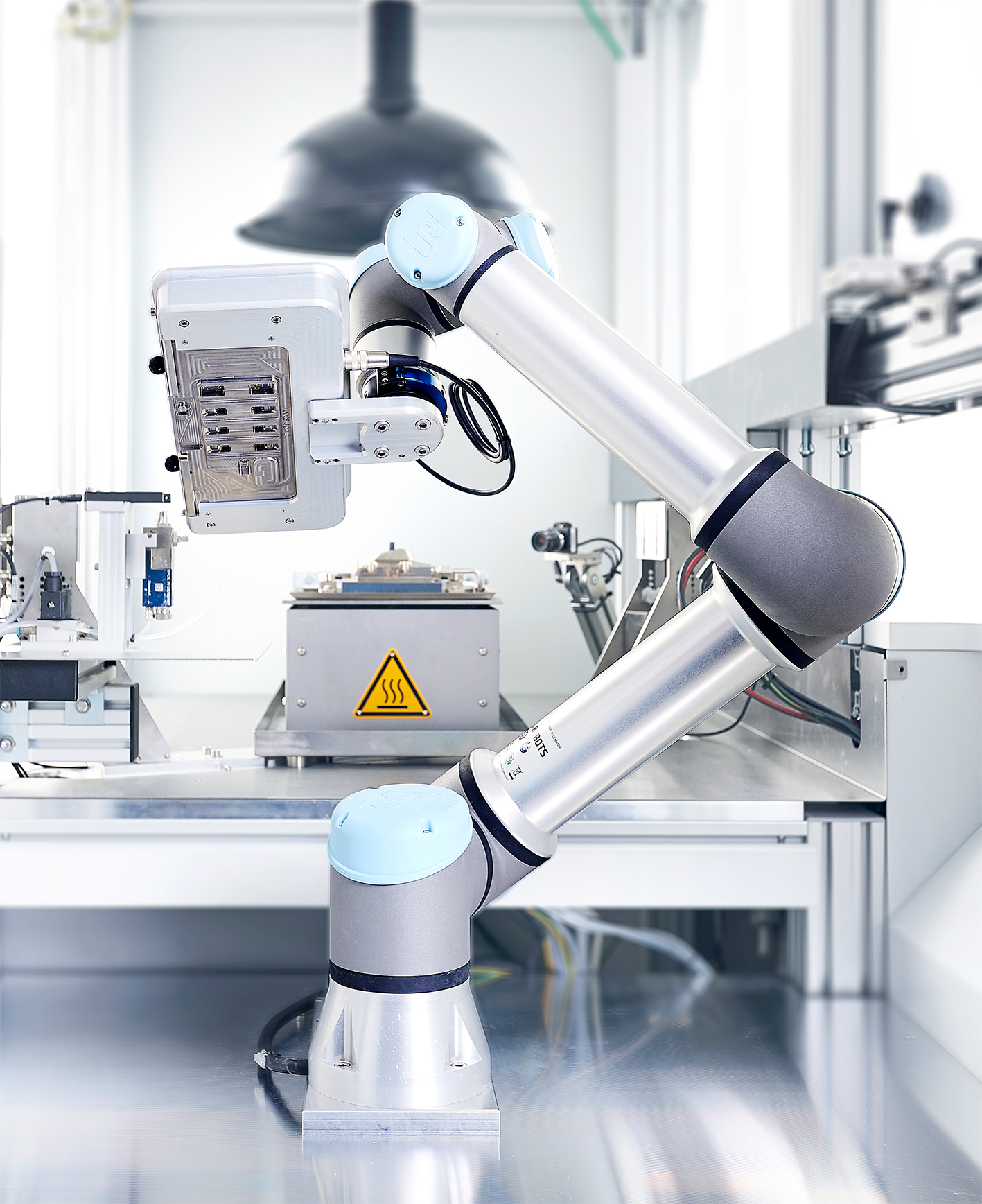
Der innere Aufbau von Schaltschränken ist häufig sehr kundenspezifisch. Die daraus resultierende hohe Varianz und geringe Losgröße behindert in vielen Fällen eine effiziente Automatisierung. Ziel des Forschungsprojekts RoboSchalt an der Ruhr-Universität Bochum ist ein Konzept für die automatisierte Verdrahtung von Klemmen unter Nutzung eines Industrieroboters.
Bild: Lehrstuhl für Produktionssysteme, Ruhr-Universität Bochum
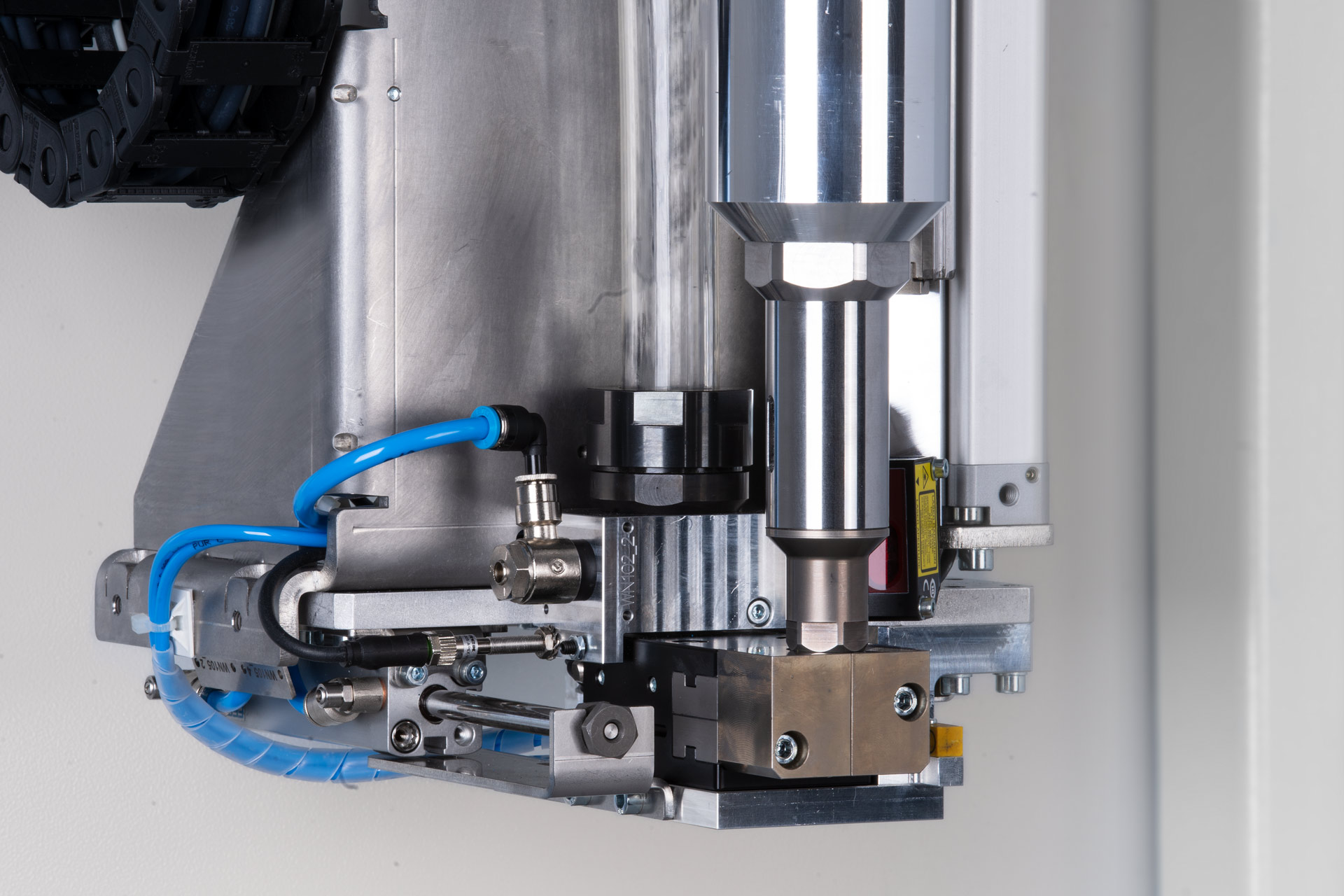
Bild: Lehrstuhl für Produktionssysteme, Ruhr-Universität Bochum

Projekt Roboschalt
mehr lesen